В этот день… №2-29 (11-20 августа)
 Как попасть в нужную точку пространства, а точнее на необходимую орбиту. Эта непростая задача решается системой управления летательного аппарата (ЛА) и главным, а точнее единственным исполнительным органом этой системы — ракетным двигателем. Сегодня начинаем рассказ о регуляторах ЖРД. Ну и ещё о некоторых проектах, воплощённых в металле в КНР и СССР.
Как попасть в нужную точку пространства, а точнее на необходимую орбиту. Эта непростая задача решается системой управления летательного аппарата (ЛА) и главным, а точнее единственным исполнительным органом этой системы — ракетным двигателем. Сегодня начинаем рассказ о регуляторах ЖРД. Ну и ещё о некоторых проектах, воплощённых в металле в КНР и СССР.
![]() 11, 12 августа 1962 года — первый групповой полёт КК «Восток-3» и «Восток-4» (СССР).
11, 12 августа 1962 года — первый групповой полёт КК «Восток-3» и «Восток-4» (СССР).
Ещё в 1961 году, после успешного космического полёта Г. С. Титова на КК «Восток-2», у Главного конструктора С. П. Королёва возник замысел осуществить в ноябре совместный полёт сразу трёх «Востоков» продолжительностью до трёх суток с установлением визуального наблюдения и радиосвязи между их экипажами. Не исключено, что идея такого полёта исходила из «верхов» политического руководства СССР, и программу предстояло реализовать ещё до ноябрьского праздника, к окончанию работы ХХII съезда КПСС.
Предполагаемый ноябрьский старт трёх «Востоков» взбудоражил Центр подготовки космонавтов. До середины августа 1961 года были сформированы основные и дублирующие экипажи: Николаев — Быковский, Попович — Леонов, Нелюбов — Хрунов. В сентябре вопрос о групповом полёте не был решён в правительстве, а в октябре руководству стало уже не до космоса. Из-за внутренних неурядиц было сокращено финансирование многих оборонных программ, уменьшились затраты и на космос.
В начале нового, 1962 года, С. П. Королёв вновь вернулся к идее группового космического полёта. К тому времени соотношение космических стартов в США и СССР было не в пользу Советского Союза — сто двадцать к двадцати. И в день старта Джона Гленна, 20 февраля 1962 года, А. Г. Николаев и П. Р. Попович были назначены пилотами кораблей «Восток-3» и «Восток-4». Ориентировочно групповой полёт был назначен на 10-12 марта. Однако 7 марта старты были отложены «по техническим причинам».
 11 марта 1962 года Главный конструктор встретился с заместителем председателя Совета Министров СССР Д. Ф. Устиновым. Тот среди возможных причин отмены полёта двух кораблей назвал усложняющуюся международную обстановку, вызванную кубинским кризисом. Но только 15 марта С. П. Королёву стало известно о выделении довольно значительных средств ОКБ-52 на осуществление проекта универсальной ракеты-носителя УР-700. В. Н. Челомей взял на себя обязательство — осуществить проект в кратчайший срок — всего за три года. И это при том, что ОКБ-1 уже вело работы по тяжёлому носителю Н-1.
11 марта 1962 года Главный конструктор встретился с заместителем председателя Совета Министров СССР Д. Ф. Устиновым. Тот среди возможных причин отмены полёта двух кораблей назвал усложняющуюся международную обстановку, вызванную кубинским кризисом. Но только 15 марта С. П. Королёву стало известно о выделении довольно значительных средств ОКБ-52 на осуществление проекта универсальной ракеты-носителя УР-700. В. Н. Челомей взял на себя обязательство — осуществить проект в кратчайший срок — всего за три года. И это при том, что ОКБ-1 уже вело работы по тяжёлому носителю Н-1.
16 июля 1962 года Государственная комиссия рассмотрела вопрос о подготовке группового космического полёта и назначила его на первую декаду августа.
11 августа 1062 года в 11 ч 30 мин КК «Восток-3» с лётчиком-космонавтом А. Г. Николаевым успешно стартовал в космос. А через сутки, 12 августа в 11 ч 2 мин КК «Восток-4» с лётчиком-космонавтом П. Р. Поповичем ушёл на орбиту. Запуск двух кораблей с одной стартовой площадки в течение двух суток потребовал очень слаженной работы всех служб космодрома и в первую очередь испытательной бригады. При запуске обоих кораблей отлично сработали ракетно-космические системы. Различие в наклонении орбит кораблей составило всего несколько минут дуги, а в расстоянии от Земли — лишь несколько километров. Корабли в момент вывода оказались на расстоянии в шесть с половиной километров друг от друга. Николаев и Попович установили между кораблями коротковолновую радиосвязь. Их полёт транслировался по каналам советского телевидения.
В ходе полёта космонавты вели киносъёмку поверхности Земли, программа которой основывалась на анализе изображений, полученных при полёте корабля «Восток-2». Так, А. Г. Николаев снимал поверхность Земли, а П. Р. Попович — линию горизонта и зону терминатора. Кроме того, на борту были установлены кинокамеры для регистрации действия космонавтов во время полёта.
 Утром 14 августа состоялось заседание Государственной комиссии, которая приняла решение о возвращении космонавтов на Землю 15 августа — Николаева на 65-м витке а Поповича на 49-м. Таким образом, полёт А. Г. Николаева продлевался с его согласия на одни сутки. 5 августа с разницей в шесть с небольшим минут, Николаев и Попович приземлились недалеко друг от друга.
Утром 14 августа состоялось заседание Государственной комиссии, которая приняла решение о возвращении космонавтов на Землю 15 августа — Николаева на 65-м витке а Поповича на 49-м. Таким образом, полёт А. Г. Николаева продлевался с его согласия на одни сутки. 5 августа с разницей в шесть с небольшим минут, Николаев и Попович приземлились недалеко друг от друга.
Конечно, для столь точного вывода на орбиту двух космических кораблей требовалось выполнить баллистические расчёты и правильно оценить заправку баков ракеты-носителя. Но основным исполнительным устройством, обеспечившим точность выведения на заданную орбиту, был ЖРД третьей ступени РН «Восток», а точнее, его система регулирования.
Требования к системам автоматического регулирования ЖРД предъявляются весьма жёсткие. Так, максимально допустимые погрешности ориентировочно составляют по тяге 2%, по соотношению компонентов топлива в основной камере 1,5%, в газогенераторе 2,0%, по давлению наддува баков 3,0%. Это объясняется тем, что в конце активного участка полёта ракета должна иметь некоторое, совершенно определённое и точно выдержанное сочетание параметров: конечной скорости Wк, угла наклона траектории γ0 и высоты над поверхностью земли h0.
 В то же время на ракеты в полете действуют многочисленные возмущения, приводящие к отклонению её траектории от расчётной. Часть возмущающих воздействий относится к работе ДУ в составе РН (объем баков, вес ракеты, тяга двигателя и ее направление, расход компонентов топлива и их соотношение и т. д.). Другие факторы связаны с внешними условиями: порывы ветра, отклонение аэродинамических коэффициентов, воздействие стартовых устройств, возмущения при разделении ступеней и т. д.
В то же время на ракеты в полете действуют многочисленные возмущения, приводящие к отклонению её траектории от расчётной. Часть возмущающих воздействий относится к работе ДУ в составе РН (объем баков, вес ракеты, тяга двигателя и ее направление, расход компонентов топлива и их соотношение и т. д.). Другие факторы связаны с внешними условиями: порывы ветра, отклонение аэродинамических коэффициентов, воздействие стартовых устройств, возмущения при разделении ступеней и т. д.
Системы управления ракеты осуществляют управление полётом ракеты и обеспечивают компенсацию всех возмущений, приводящих к отклонению траектории полёта от расчётной. Для полной компенсации влияния возмущающих воздействий и обеспечения высокой точности выполнения программы полёта система управления должна обладать определённой эффективностью, т.е. способностью создавать с необходимой скоростью достаточные управляющие силы и моменты путём изменения вектора тяги двигателей.
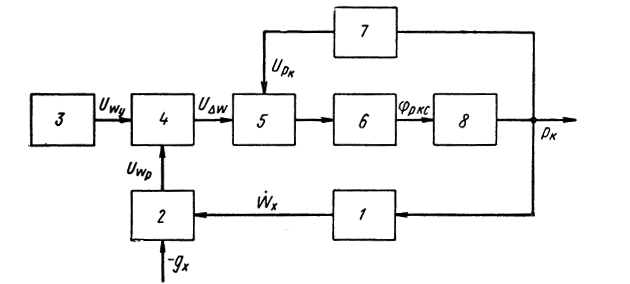
Продольная составляющая скорости полёта поддерживается в соответствии с программой путём изменения тяги двигателя. Точное поддержание скорости полёта позволяет уменьшить разброс параметров ракеты и упрощает систему, выключающую двигатель. Примерная структура системы регулирования кажущейся скорости (РКС) представлена на рисунке.
 |
|
Структурная схема системы РКС: |
Акселерометр в полете измеряет не действительное Wx, а кажущееся ускорение, так как на его чувствительный элемент действует как ускорение ракеты, так и ускорение силы тяжести g. При этом составляющую (проекцию) ускорения силы тяжести gx акселерометр воспринимает как ускорение ракеты, направленное в сторону, обратную действию силы тяжести. Кажущаяся скорость полёта Wp определяется путём интегрирования ускорения интегратором.
Полученное значение электрического сигнала UWр, пропорциональное кажущейся скорости, попадает на сравнивающее устройство, на которое подаётся также программное значение сигнала UWy кажущейся скорости. Сигнал рассогласования UΔW передаётся на усилитель, где он усиливается и преобразуется в сигнал управления приводом системы РКС, установленным на регулирующем или дросселирующем элементе двигателя. Изменение положения привода системы РКС φРКС является для двигателя управляющим воздействием, изменяющим режим его работы, т.е. изменяющим его тягу. Направление вращения и угол поворота привода РКС зависят от знака и величины рассогласования заданного и действительного значения кажущейся скорости.
Для улучшения динамических свойств замкнутой системы регулирования кажущейся скорости в её состав часто вводят дополнительную внутреннюю обратную связь по давлению в камере сгорания. В этом случае система РКС реагирует не только на отклонение кажущейся скорости, но и на изменение давления в камере сгорания двигателя Upк.
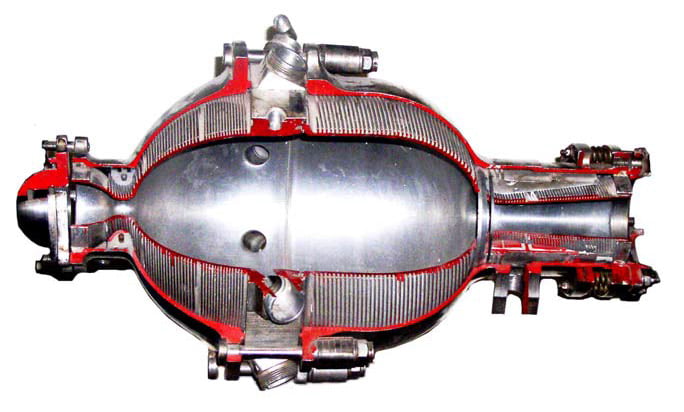
Регулятор двигателя третьей ступени РН «Восток» РД-0109 (8Д719), являющийся исполнительным устройством системы РКС, был разработан, также как и двигатель, в КБ Химавтоматики (г. Воронеж). Он представляет собой статический регулятор прямого действия (т.е. без усилительных элементов) с переменной настройкой. Регулятор поддерживает требуемый режим работы двигателя или переводит его на новый режим работы. Он установлен на линии окислителя между насосом жидкого кислорода и газогенератором. Тяга двигателя регулируется путём изменения режима работы газогенератора. Изменение тяги двигателя обеспечивается переводом газогенератора на новый режим работы за счёт изменения давления окислителя после регулятора. С изменением давления окислителя после регулятора изменяется расход газов через газогенератор, что приводит к изменению числа оборотов ТНА. Это, в свою очередь, приводит к изменению напора и производительности насосов, а следовательно, и давления в камере сгорания.
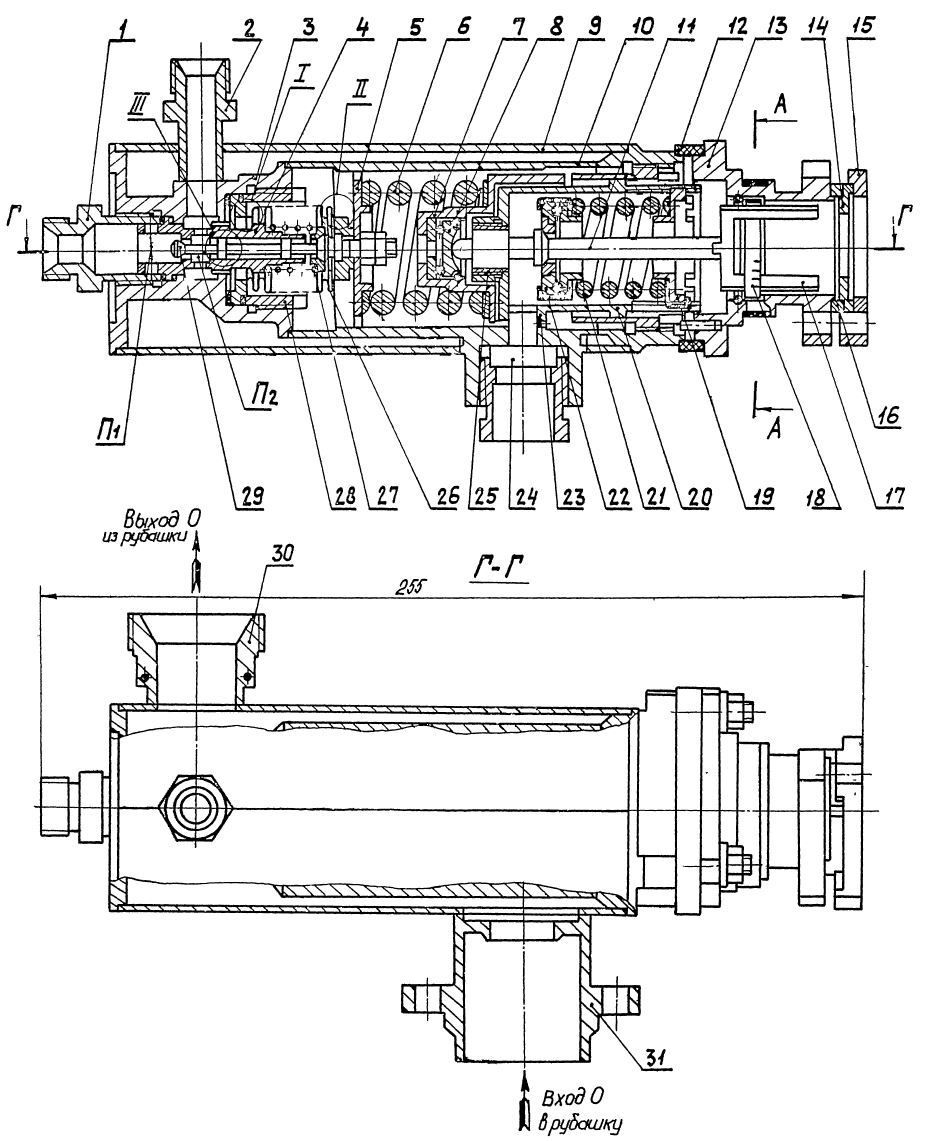 Окислитель из насоса поступает в регулятор через штуцер 1 в полость высокого давления, а из неё в полость пониженного давления, дросселируясь в сечении между иглой 29 и кромкой седла гильзы 4. Отвод окислителя в газогенератор производится через штуцер 2. Часть окислителя из полости пониженного давления по зазору между корпусом 3 и гильзой 4 попадает в полость сильфонного узла. Под действием силы давления окислителя сильфон растягивается, сжимая пружину 6 до тех пор, пока усилие, развиваемое пружиной, не сравняется с действующей на неё силой давления жидкости. При установившемся равновесии сил игла 29, связанная с сильфонным узлом, займёт положение, которое требуется для получения необходимого выходного давления. При изменении давления на выходе из насосов, равновесие сил системы нарушится, и сильфон начнёт растягиваться (если давление окислителя увеличится) или сжиматься (если давление окислителя уменьшится). Тогда пружина 6 будет сжиматься (или растягиваться) до тех пор, пока не восстановится равновесие сил системы, но уже при таком положении иглы, которое уменьшает (или увеличивает) проходное сечение. В результате этого давление окислителя на выходе из регулятора уменьшится (или увеличиться), что приведёт к уменьшению (увеличению) расхода газа через газогенератор и, следовательно, к восстановлению необходимого числа оборотов ТНА. Таким образом, на выходе из насосов вновь установится давление, определяемое усилием задающей пружины 6.
Окислитель из насоса поступает в регулятор через штуцер 1 в полость высокого давления, а из неё в полость пониженного давления, дросселируясь в сечении между иглой 29 и кромкой седла гильзы 4. Отвод окислителя в газогенератор производится через штуцер 2. Часть окислителя из полости пониженного давления по зазору между корпусом 3 и гильзой 4 попадает в полость сильфонного узла. Под действием силы давления окислителя сильфон растягивается, сжимая пружину 6 до тех пор, пока усилие, развиваемое пружиной, не сравняется с действующей на неё силой давления жидкости. При установившемся равновесии сил игла 29, связанная с сильфонным узлом, займёт положение, которое требуется для получения необходимого выходного давления. При изменении давления на выходе из насосов, равновесие сил системы нарушится, и сильфон начнёт растягиваться (если давление окислителя увеличится) или сжиматься (если давление окислителя уменьшится). Тогда пружина 6 будет сжиматься (или растягиваться) до тех пор, пока не восстановится равновесие сил системы, но уже при таком положении иглы, которое уменьшает (или увеличивает) проходное сечение. В результате этого давление окислителя на выходе из регулятора уменьшится (или увеличиться), что приведёт к уменьшению (увеличению) расхода газа через газогенератор и, следовательно, к восстановлению необходимого числа оборотов ТНА. Таким образом, на выходе из насосов вновь установится давление, определяемое усилием задающей пружины 6.
Давление на входе в регулятор на номинальном режиме — 6,53 МПа. Давление на выходе из регулятора на номинальном режиме — 5,05 МПа.
Для управления режимами работы газогенератора имеется настроечная часть регулятора с приводом. Вал привода находится в зацеплении с вилкой 17 винта 11. При повороте вилки изменяется усилие затяжки пружины 6, тем самым увеличивая или уменьшая усилие, с которым пружина действует на сильфонный узел. Равновесие сил системы нарушается, и игла или опускается, увеличивая расход окислителя в газогенератор, или поднимается, уменьшая расход. Это приводит к увеличению или уменьшению давления на выходе из насосов. Двигатель, таким образом, переводится на новый режим работы.
Вот так, без компьютеров была решена задача регулирования ЖРД выводной ступени РН, которая и определяет точность выведения на орбиту космического аппарата. Конечно, двигатель имеет не только регулятор системы РКС, а и другие регулирующие устройства — дроссели, стабилизаторы соотношения компонентов и др. Но о них мы поговорим в других обзорах.
Кстати, в те годы, когда создавался двигатель РД-0109, разработкой агрегатов занимались отдельные конструкторские бригады, входящие в состав единого конструкторского отдела КБ Химавтоматики, численность которого не превышала 60 человек. Агрегатный конструкторский отдел КБ был образован позже, в 1963 году.
![]() 14 августа 1992 года — китайская ракета-носитель CZ-2E («Чанчжэн-2Е») успешно вывела на орбиту австралийский спутник (КНР).
14 августа 1992 года — китайская ракета-носитель CZ-2E («Чанчжэн-2Е») успешно вывела на орбиту австралийский спутник (КНР).
После начала реализации политики реформ и открытости для ведения внешнеэкономической деятельности в области космической промышленности 16 октября 1980 года была создана промышленная компания «Великая стена». 26 октября 1985 года правительство Китая заявило о выходе ракет «Чанчжэн» на международный рынок. За освоение рынка отвечала компания «Великая стена», которая впоследствии получила эксклюзивные права на запуск международных коммерческих спутников и международное сотрудничество в области спутников.
 В середине 1980-х годов в мире произошло несколько аварий ракет-носителей, что дало шанс китайской ракетно-космической отрасли закрепиться на мировом рынке. Уже в августе 1987 года РН CZ-2С (модификация РН CZ-2, о которой мы рассказывали в обзоре №2-03 21–30.11.2016) успешно вывела на орбиту две микрогравитационных испытательных установки для французской компании «Матра» (Matra). Китай впервые обеспечил запуск полезной нагрузки для иностранной компании. Но грузоподъёмность на низкую орбиту у CZ-2С была всего 2400 кг. Нужен был новый носитель.
В середине 1980-х годов в мире произошло несколько аварий ракет-носителей, что дало шанс китайской ракетно-космической отрасли закрепиться на мировом рынке. Уже в августе 1987 года РН CZ-2С (модификация РН CZ-2, о которой мы рассказывали в обзоре №2-03 21–30.11.2016) успешно вывела на орбиту две микрогравитационных испытательных установки для французской компании «Матра» (Matra). Китай впервые обеспечил запуск полезной нагрузки для иностранной компании. Но грузоподъёмность на низкую орбиту у CZ-2С была всего 2400 кг. Нужен был новый носитель.
Весной 1986 года Первая академия выдвинула идею новой ракеты, которая заключалась в следующем: присоединить к «Чанчжэн-2» четыре стартовых ракетных ускорителя и постараться в кратчайшие сроки разработать ракету большой грузоподъёмности и тяги (условное наименование «Чанчжэн-2Е». Говоря более конкретно, предполагалось взять в качестве центрального блока ракету «Чанчжэн-2С», подсоединить четыре жидкостных стартовых ускорителя длиной 15,3 м и диаметром 2,25 м, верхнюю ступень, а спутник установить под обтекателем диаметром 4,2 м и высотой 10,5 м. Длина всей ракеты составит 50 м, диаметр центрального блока — 3,35 м, общая тяга двигателей 5880 кН. При этом грузоподъёмность при выводе на низкие орбиты повышается с 2,4 т до 9,2 т. При использовании твердотопливной верхней ступени на геосинхронную переходную орбиту можно было вывести полезную нагрузку массой 3 т, а если верхняя ступень будет кислородно-водородной, то грузоподъёмность при выводе на такие орбиты достигла бы приблизительно 4,8 т.
В марте 1986 года министерство космической промышленности направило в США группу из десяти человек с чертежами новой ракеты для рекламы и подписания контракта на запуск спутника. Новый проект обратил на себя внимание производителей спутников и спутниковых операторов. В сентябре 1987 года австралийская компания «Оптус» (Optus) проводила в Сиднее тендер на создание государственной спутниковой системы второго поколения, в котором приняли участие четыре большие корпорации. Участвовала в тендере и промышленная компания «Великая стена». 16 июня 1986 года были подведены итоги: победил проект вывода на орбиту двух спутников HS-601 американской компании «Хьюз» (Hughes) с помощью китайской РН «Чанчжэн-2Е».
Из-за быстрых темпов разработки в «Чанчжэн-2Е» старались использовать только технологии, отработанные в процессе разработки других РН, особенно это касалось ракеты «Чанчжэн-2С». Для удовлетворения требований к запуску австралийского спутника были применены новые технологии:
- увеличение длины корпуса центрального блока для увеличения времени работы двигателей двух ступеней;
- применение «пакетной» технологии как самой эффективной меры для повышения грузоподъёмности. Так, тяга первой ступени увеличилась с 2,74 МН до 5,9 МН;
- в двигателе второй ступени применили смесительные элементы большего размера. Эта эффективная мера для повышения удельной тяги способствовала ещё большему повышению грузоподъёмности;
- разработка большого обтекателя диаметром 4,2 м и длиной 10,5 м для совместимости с разной нагрузкой и запуска нескольких спутников одной ракетой;
- применение в системе управления технических новшеств, включая разработку системы программного обеспечения по стабильному наведению и комплексному управлении.
Проектировщикам приходилось быстро решать проблемы, связанные с повышением взлётной массы ракеты (462 т вместо 192 т у РН CZ-2С), в отношении проектирования конструкции, материалов и кинетики. Соединение отдельных блоков в пакет также вызвало некоторые проблемы, связанные с прочностью, конструкцией, пневматической системой, разделением блоков и т. д.
 Главные технические и функциональные параметры РН CZ-2E следующие: две ступени, общая длина 49,686 м, максимальный диаметр (включая стартовые ускорители) — 11,45 м; взлётная масса — 462,46 т; взлётная тяга — 5923,2 кН; тяговооружённость — 1,31. Грузоподъёмность при выведении на близкую к круговой орбиту высотой 200 км и наклонением 28,5° — 9,2 т. Точность выведения: отклонение перигея — 2,0 км; угловое отклонение — 0,05°; точность положения на орбите — 0,5°.
Главные технические и функциональные параметры РН CZ-2E следующие: две ступени, общая длина 49,686 м, максимальный диаметр (включая стартовые ускорители) — 11,45 м; взлётная масса — 462,46 т; взлётная тяга — 5923,2 кН; тяговооружённость — 1,31. Грузоподъёмность при выведении на близкую к круговой орбиту высотой 200 км и наклонением 28,5° — 9,2 т. Точность выведения: отклонение перигея — 2,0 км; угловое отклонение — 0,05°; точность положения на орбите — 0,5°.
Первая РН CZ-2E («Чанчжэн-2Е») была выпущена с завода 22 апреля 1990 года. 20 мая лётный образец был доставлен на космодром, а 29 июня установлен на стартовом столе в Сичанском центре запуска спутников. 16 июля 1990 года в 9 ч 40 мин первая ракета CZ-2E вывела на орбиту макет австралийского спутника и научно-экспериментальный спутник Пакистана.
22 марта 1992 года РН «Чанчжэн-2Е» впервые должна была осуществить запуск австралийского спутника, но из-за попадания посторонних алюминиевых предметов, первый и третий двигатель выключились, и старт был прекращён. После обнаружения причины аварии и её устранения, 14 августа 1992 года вторая ракета «Чанчжэн-2Е» успешно вывела австралийский спутник на заданную орбиту.
Несмотря на успех, жизнь новой РН оказалась не очень долгой. После двух аварий, которые произошли 21.12.1992 и 25.01.1995, было принято решение перейти к использованию РН CZ-3В. Всего состоялось восемь запусков ракеты CZ-2Е. Последний был 28.12.1995. Но положительный опыт, полученный при её создании, а также удачные технические решения нашли своё продолжение в новой РН CZ-2F, о которой мы обязательно расскажем.
РН CZ-2Е имела общие черты с многими предшествующими и последующими конструкциями китайских ракет-носителей. Прежде всего, это касается топливных компонентов как первой, так и второй ступеней. Это были четырёхокись азота и несимметричный диметилгидразин. Жидкостные ракетные двигатели этих ступеней: на стартовых ускорителях и первой ступени — ЖРД YF-20B (по одному на каждом блоке), на второй ступени — один YF-22B. Основные технические характеристики ЖРД YF-20B: тяга — 743,5 кН; удельный импульс тяги — 2557 м/с; время работы — до 160 с; соотношение компонентов — 2,1:1.
Основные технические характеристики ЖРД YF-22B: тяга — 740,4 кН: удельный импульс тяги — 2923 м/с; время работы — до 300 с; соотношение компонентов — 2,18:1.
Кроме маршевого двигателя YF-22B на второй ступени установлен рулевой ЖРД YF-23B со следующими характеристиками: тяга — 47100 Н; удельный импульс тяги — 2835 м/с; время работы — более 300 с; соотношение компонентов — 1,57:1.
![]() 18 августа 1946 года — первый в СССР публичный полёт самолёта С. А. Лавочкина «120Р» с работающим ЖРД РД-1ХЗ (СССР).
18 августа 1946 года — первый в СССР публичный полёт самолёта С. А. Лавочкина «120Р» с работающим ЖРД РД-1ХЗ (СССР).
Скорость опытных истребителей в начале 1940-х превысила 700-километровый рубеж, и дальнейший её рост сдерживался как недостаточной мощностью поршневого двигателя, так и воздушным винтом. Для дальнейшего прогресса требовался турбореактивный двигатель, а его в СССР не было, как не было и лёгкого поршневого двигателя мощностью свыше 2000 л.с.
В то же время имелся определённый задел по разработке ЖРД и ПВРД (пульсирующие ВРД появились позже, после получения Советским Союзом трофейных немецких материалов). Эти обстоятельства привели к возрождению идеи конструктора А. Я. Щербакова по комбинированной силовой установке самолёта (поршневой и реактивный двигатели). В качестве ускорителей рассматривались, прежде всего, ЖРД, так как весьма проблематичные ПВРД требовали дополнительных исследований и доводки.
 Определённые надежды возлагались на ЖРД РД-1, разработанный в казанском Спецтехотделе НКВД под руководством В. П. Глушко и испытанный на летающей лаборатории Пе-2 при участии С. П. Королёва. Стендовый образец РД-1 прошёл в 1942 г. испытания длительностью 1 ч 10 мин. за 25 пусков без съёма со стенда. Максимальная длительность непрерывной работы достигала 40 мин и определялась ёмкостью баков. В 1943 г. были проведены официальные стендовые и лётные испытания, а с 1944 г. по решению Государственного Комитета Обороны (ГКО) этот двигатель в двух модификациях находился в серийном производстве. Основанием для разработки боевых машин с комбинированной силовой установкой стало постановление ГКО от 22 мая 1944 года. Согласно этому документу наряду с самолётами других конструкторов предлагалось установить РД-1 и на Ла-5ФН. При штатном вооружении Ла-5ФН максимальная скорость полуреактивного истребителя должна была быть не менее 780 км/ч на высоте 7000 м. подниматься на 5000 м он должен был за 3 минуты (время работы ЖРД) при дальности полёта на основном двигателе — 300 км. Самолёт требовалось построить в трёх экземплярах, причём первый — к сентябрю 1944 года, а последний с ламинарным профилем крыла — к январю 1945 года. Но все предложения по установке ЖРД на самолёте Ла-5ФН остались на бумаге.
Определённые надежды возлагались на ЖРД РД-1, разработанный в казанском Спецтехотделе НКВД под руководством В. П. Глушко и испытанный на летающей лаборатории Пе-2 при участии С. П. Королёва. Стендовый образец РД-1 прошёл в 1942 г. испытания длительностью 1 ч 10 мин. за 25 пусков без съёма со стенда. Максимальная длительность непрерывной работы достигала 40 мин и определялась ёмкостью баков. В 1943 г. были проведены официальные стендовые и лётные испытания, а с 1944 г. по решению Государственного Комитета Обороны (ГКО) этот двигатель в двух модификациях находился в серийном производстве. Основанием для разработки боевых машин с комбинированной силовой установкой стало постановление ГКО от 22 мая 1944 года. Согласно этому документу наряду с самолётами других конструкторов предлагалось установить РД-1 и на Ла-5ФН. При штатном вооружении Ла-5ФН максимальная скорость полуреактивного истребителя должна была быть не менее 780 км/ч на высоте 7000 м. подниматься на 5000 м он должен был за 3 минуты (время работы ЖРД) при дальности полёта на основном двигателе — 300 км. Самолёт требовалось построить в трёх экземплярах, причём первый — к сентябрю 1944 года, а последний с ламинарным профилем крыла — к январю 1945 года. Но все предложения по установке ЖРД на самолёте Ла-5ФН остались на бумаге.
Вместо Ла-5ФН с РД-1, в октябре 1944 года построили первый Ла-7Р-1. В его хвостовой части размещался ЖРД РД-1 с насосной системой подачи топливных компонентов с приводом от основного двигателя АШ-82ФН. Бак окислителя, вмещавший 270 кг азотной кислоты, находился в центроплане, а горючего (60 кг керосина) — в правой консоли крыла. При этом запас бензина сократился до 210 кг. Управление ЖРД осуществлялось, как и АШ-82ФН, с помощью рычага сектора газа и пускового крана.
 Заводские испытания Ла-7Р-1 начались в конце октября. Через несколько дней лётчик-испытатель А. В. Давыдов выполнил на нём первый полёт. До 24 февраля 1945 года состоялось лишь 15 полётов, из них пять с включением ЖРД, после чего самолёту потребовался ремонт.
Заводские испытания Ла-7Р-1 начались в конце октября. Через несколько дней лётчик-испытатель А. В. Давыдов выполнил на нём первый полёт. До 24 февраля 1945 года состоялось лишь 15 полётов, из них пять с включением ЖРД, после чего самолёту потребовался ремонт.
Надёжность двигателя была крайне неудовлетворительна. И одной из причин этого было применение в качестве окислителя для ракетного двигателя такого агрессивного компонента как азотная кислота. Не помогло и использование в силовой установке кислотостойких материалов — чистого алюминия и его сплавов, а также нержавеющей стали. Кроме того на двигателе РД-1 применялось электрическое зажигание компонентов топлива в камере сгорания, а оно часто подводило.
26 января 1945 года начались лётные испытания второго Ла-7Р-2 с двигателем РД-1, оснащённым эфиро-воздушным зажиганием. В течение двух месяцев ЖРД запускались 45 раз, из них 6 — в воздухе. Лишь в двух полётах удалось снять характеристики машины. Из 45 запусков РД-1 отказывали 15 раз, из них 6 по вине зажигания, дважды менялись камеры сгорания.
Максимальный прирост скорости составил около 95 км/ч на высоте 2600 м. Испытания завершились 27 марта взрывом ЖРД. Лишь чудом лётчик-испытатель Г. М. Шиянов спас повреждённый самолёт.
 Свыше двух недель ушло на ремонт машины, но доработанный за это время ЖРД по-прежнему не желал запускаться на больших высотах. Лишь использование РД-1ХЗ с химическим зажиганием позволило сдвинуть проблему запуска с мёртвой точки, но повысить надёжность ЖРД не удалось. С двигателем РД-1ХЗ с целью его отработки только на стенде было сделано 1972 огневых испытания, а вместе с испытаниями на самолётах — 2200 пусков. В отдельные дни делали по 100 и более пусков одного двигателя в день, суммарно до 500 пусков, причём двигатель сохранял работоспособность. В итоге были разработаны пневмогидравлическая и электрическая схемы двигателя, совместно с конструктивными мероприятиями обеспечившие безотказный, плавный, безударный запуск двигателя.
Свыше двух недель ушло на ремонт машины, но доработанный за это время ЖРД по-прежнему не желал запускаться на больших высотах. Лишь использование РД-1ХЗ с химическим зажиганием позволило сдвинуть проблему запуска с мёртвой точки, но повысить надёжность ЖРД не удалось. С двигателем РД-1ХЗ с целью его отработки только на стенде было сделано 1972 огневых испытания, а вместе с испытаниями на самолётах — 2200 пусков. В отдельные дни делали по 100 и более пусков одного двигателя в день, суммарно до 500 пусков, причём двигатель сохранял работоспособность. В итоге были разработаны пневмогидравлическая и электрическая схемы двигателя, совместно с конструктивными мероприятиями обеспечившие безотказный, плавный, безударный запуск двигателя.
Разобраться в неудачах с этим двигателем удалось лишь к середине лета. С 11 июля по 16 ноября 1945 года было выполнено 14 полётов на Ла-7Р-2. За это время сменили четыре камеры сгорания и два насосных агрегата, сделали 49 пусков, из них восемь — в воздухе. ЖРД отказывали 23 раза, из них по вине зажигания — два раза. В пяти полётах удалось снять скоростные характеристики данного самолёта. Была зарегистрирована максимальная скорость 795 км/ч на высоте 6300 м. Однако сделать из деревянного Ла-7 боевую машину с ЖРД так и не удалось.
В 1945 году более скоростным и поэтому более предпочтительным истребителем для установки ЖРД был самолёт «120». Самолёт внешне почти не отличался от предшественника Ла-7, но был выполнен в основном из металлических конструкций. Изменилась также конструкция крыла и его профиль.
Для установки на самолёт «120» двигателя РД-1ХЗ, машину пришлось перекомпоновать и полностью заменить хвостовую часть с оперением.
Испытания «120Р» проходили параллельно с испытаниями Ла-7Р-2. Кроме доводки ЖРД пришлось повозиться с доработкой топливной и масляной систем истребителя. Фактически все полуреактивные истребители ОКБ-301 стали летающими лабораториями по отработке ЖРД. Даже на последней машине из 16 полётов с работающим ЖРД удалось сделать лишь 7. В одном из них зарегистрировали скорость 725 км/ч, получив прирост 103 км/ч.
 Кульминацией в истории с «120Р» стал пролёт лётчика А. В. Давыдова на воздушном празднике в Тушине в 1946 году. Полёты «120Р» завершились 18 августа, когда из-за воспламенения смеси компонентов топлива в подкапотном пространстве ЖРД обгорели хвостовая часть фюзеляжа и оперения. Так завершилась биография самолёта «120Р».
Кульминацией в истории с «120Р» стал пролёт лётчика А. В. Давыдова на воздушном празднике в Тушине в 1946 году. Полёты «120Р» завершились 18 августа, когда из-за воспламенения смеси компонентов топлива в подкапотном пространстве ЖРД обгорели хвостовая часть фюзеляжа и оперения. Так завершилась биография самолёта «120Р».
Камера двигателя РД-1ХЗ — двустенная, с регенеративным охлаждением горючим (смесительная головка) и окислителем. Огневая стенка камеры — со спиральным оребрением для образования охлаждающего тракта; при нагреве в процессе работы ЖРД она может перемещаться относительно внешней стенки с целью компенсации температурных напряжений.
Насосный агрегат состоит из шестерённых насосов окислителя и горючего, приводимых от авиационного двигателя через гидромуфту. Насосы развивают напор, соответствующий давлению 3,5 МПа при расходе топлива 1,5 кг/с, частота вращения 33 об/с, потребляемая мощность 33 кВт. Блок дроссельных вентилей обеспечивает плавное регулирование тяги в диапазоне 2,94…1,47 кН. Зажигание топлива производится при помощи пускового горючего (смесь карбинола с бензином), находящегося в бачке, ёмкость которого рассчитана на 4 пуска.
Давление в камере сгорания — 2,01 МПа, ресурс до первой переборки — 1 час. Удельный импульс у земли — 1960 м/с. Масса двигателя — 56 кг. В том же 1946 году коллектив ОКБ-456 (будущее «НПО «Энергомаш») уже осваивал немецкий опыт и готовился перейти к куда более значительным параметрам пока ещё копируемых двигателей.
Последней попыткой создания самолёта с поршневым двигателем и ЖРД был проект цельнометаллического истребителя «130Р» с мотором АШ-82ФН на базе проектировавшегося Ла-9. На нём также предполагалось установить ЖРД РД-1ХЗ. В таком виде машину начали строить на опытном заводе ОКБ-301, но в 1946 году эту тему закрыли.
История создания отечественных самолётов с комбинированной силовой установкой является примером попытки объединить в одном объекте преимущества двух разных двигателей — поршневого и ракетного. И, как это часто бывает, получилось суммирование недостатков, а не достоинств. Примеров в истории техники неудачных химер довольно много. Можно вспомнить, как в ХIХ веке, с появлением паровых машин, их пытались совместить с парусным вооружением кораблей. Правда, есть довольно большой класс судов, оснащённых и парусами и двигателями внутреннего сгорания — яхты самых разных размеров. Может быть, и летательные аппараты с комбинированной силовой установкой тоже будут востребованы для решения каких-то специфических задач? Поживём, увидим.
При подготовке материалов были использованы следующие источники:
- А. А. Александров. Путь к звездам. Из истории советской космонавтики. — М.: «Вече», 2011.
- Б. Ф. Гликман. Автоматическое регулирование жидкостных ракетных двигателей — М.: «Машиностронение», 1989.
- Атлас конструкций ЖРД. Часть III. / Под общ. ред. проф. Г. Г. Гахуна. — М.: Московский ордена Ленина и ордена Октябрьской революции авиац. ин-т им. Серго Орджоникидзе, 1981.
- Чэнчжи Ли. Развитие китайских космических технологий / Под ред. Бао Оу, Хан Ихуа, Ю. М. Батурина и др. — СПб.: «Нестор-История», 2013.
- С. П. Уманский. Ракеты-носители. Космодромы. — М.: «Рестарт+», 2001.
- Двигатели 1944-2000. Авиационные, ракетные, морские, промышленные. — М.: «АКС-Конверсалт», 2000.
- А. В. Амброжевич. Развитие транспортных систем с ЖРДУ. — Харьков: Рукопись, 2007.
- Н. В. Якубович. Истребители Лавочкина. Сломавшие хребет Люфтваффе. — М.: «Яуза», «Эксмо», 2008.
| « | В этот день… №2-28 (1-10 августа) | В этот день… №2-30 (21-31 августа) | » |

