В этот день… №3-25 (1-10 июля)
 Затруднительно переделать самолёт-штурмовик в самолёт сельхозавиации, танк в трактор, а крейсер в круизный лайнер. А вот с МБР всё гораздо проще. Достаточно заменить полезную нагрузку и полётное задание.
Затруднительно переделать самолёт-штурмовик в самолёт сельхозавиации, танк в трактор, а крейсер в круизный лайнер. А вот с МБР всё гораздо проще. Достаточно заменить полезную нагрузку и полётное задание.
![]() 1 июля 1959 года — первое испытание атомного реактора «Киви-А» (США).
1 июля 1959 года — первое испытание атомного реактора «Киви-А» (США).
Вначале, немного теории. То, что ракетные двигатели на химическом топливе имеют ограничения по удельному импульсу, было ясно ещё в 40-е годы ХХ века. Выходом из энергетического кризиса могла стать ядерная энергия. Как известно, для того, чтобы сообщить одному килограмму массы вторую космическую скорость, необходимо для совершения межпланетного полёта, нужна энергия примерно четырёх килограммов химического ракетного топлива, но ту же энергию в состоянии выделить миллиграмм урана. Для использования в ракетной технике более всего подходит управляемая реакция деления ядер урана или плутония. Только в этом случае можно воздействовать на ход ядерной реакции и таким образом регулировать скорость выделения атомной энергии. В ракетном двигателе, использующем ядерную энергию, необходимо разделить источник энергии и рабочее вещество, создающее тягу в двигателе. Это, конечно, усложняет конструкцию (по сравнению с традиционным ЖРД), но позволяет преодолеть ряд проблем. В ядерном РД источником энергии служит атомный реактор. В нём атомная энергия преобразуется в тепловую и сообщается веществу, охлаждающему реактор. Вещество, нагреваемое до высокой температуры, может служить непосредственно «отбросной» массой ракетного двигателя, вытекая из него наружу и таким образом создавая реактивную тягу.
 |
|
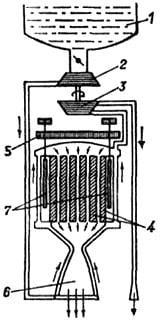
Схема ядерного ракетного двигателя (ЯРД): |
Реактивный ЯРД представляет собой конструкцию, состоящую из ядерного реактора, системы подачи рабочего тела (РТ), и сопла. РТ проходя через активную зону ядерного реактора нагревается до высоких температур (одновременно охлаждая конструкцию активной зоны) и с высокой скоростью истекает через сопло, создавая реактивную тягу. По агрегатному состоянию ядерного топлива в активной зоне реактора ЯРД делят на твердофазные, жидкофазные и газофазные (плазма).
ящик для овощей пластиковый. школа танцев для детей в марьино.
В США исследования по проблеме создания ЯРД велись в Лос-Аламосской лаборатории с 1952 г. В 1957г. начались работы по программе «Ровер» (Rover). В отличие от СССР, где велась поэлементная отработка элементов двигателя, в США пошли по пути создания и испытания сразу реактора целиком. Первый реактор, получивший наименование «Киви-А» (KIWI-А) был испытан 1 июля 1959 г. на специальном полигоне в штате Невада. Название реактора по имени новозеландской птицы не способной летать, объяснялось его назначением — он предназначался только для наземных стендовых испытаний. Активная зона реактора представляла собой связки тепловыделяющих элементов из графита, в котором диспергированы частицы делящегося ядерного горючего — карбида урана с покрытием из пиролитического графита. В тепловыделяющих элементах предусмотрены каналы для течения рабочего вещества (жидкого водорода). Чтобы устранить коррозионное действие водорода на графит, эти каналы имели покрытие из карбида ниобия. Замедлителем нейтронов служила тяжёлая вода.
 Оксид урана не выдерживал высоких температур, и водород, проходивший в каналах между пластин, мог нагреваться только до 1600°С. Мощность этих реакторов составляла всего 100 МВт. Первая серия из трёх реакторов «Киви-А» была предназначена для испытаний на газообразном водороде, начатых в 1959 году. Испытания «Киви-А», как и все последующие проводились с открытым выбросом. Активность продуктов выхлопа была невысокой, и ограничений на проведение работ в зоне испытаний практически не вводилось. Испытания реактора завершились 7 декабря 1961 г. (в ходе последнего пуска разрушилась активная зона, отмечен выброс в выхлопную струю обломков пластин). Полученные результаты шести «горячих испытаний» ЯРД оказались весьма обнадёживающими, и в начале 1961 г. был подготовлен доклад о необходимости испытаний реактора в полёте. Однако вскоре «головокружение» от первых успехов стало проходить, пришло понимание того, что на пути создания ЯРД стоит множество проблем, решение которых потребует много времени и денег. Кроме того, прогресс в создании химических двигателей для боевых ракет оставил для применения ЯРД лишь космическую сферу. Несмотря на то, что с приходом в белый дом администрации Кеннеди (в 1961 г.) работы по самолёту с атомным двигателем были прекращены, программа «Ровер» была названа «одним из четырёх приоритетных направлений в завоевании космоса» и получила дальнейшее развитие. Были приняты новые программы «Рифт» (RIFT — Reactor In Flight Test — реактор в испытательном полёте) и «Нерва» (NERVA — Nuclear Engine for Rocket Vehicle Application) — создание лётного варианта ЯРД.
Оксид урана не выдерживал высоких температур, и водород, проходивший в каналах между пластин, мог нагреваться только до 1600°С. Мощность этих реакторов составляла всего 100 МВт. Первая серия из трёх реакторов «Киви-А» была предназначена для испытаний на газообразном водороде, начатых в 1959 году. Испытания «Киви-А», как и все последующие проводились с открытым выбросом. Активность продуктов выхлопа была невысокой, и ограничений на проведение работ в зоне испытаний практически не вводилось. Испытания реактора завершились 7 декабря 1961 г. (в ходе последнего пуска разрушилась активная зона, отмечен выброс в выхлопную струю обломков пластин). Полученные результаты шести «горячих испытаний» ЯРД оказались весьма обнадёживающими, и в начале 1961 г. был подготовлен доклад о необходимости испытаний реактора в полёте. Однако вскоре «головокружение» от первых успехов стало проходить, пришло понимание того, что на пути создания ЯРД стоит множество проблем, решение которых потребует много времени и денег. Кроме того, прогресс в создании химических двигателей для боевых ракет оставил для применения ЯРД лишь космическую сферу. Несмотря на то, что с приходом в белый дом администрации Кеннеди (в 1961 г.) работы по самолёту с атомным двигателем были прекращены, программа «Ровер» была названа «одним из четырёх приоритетных направлений в завоевании космоса» и получила дальнейшее развитие. Были приняты новые программы «Рифт» (RIFT — Reactor In Flight Test — реактор в испытательном полёте) и «Нерва» (NERVA — Nuclear Engine for Rocket Vehicle Application) — создание лётного варианта ЯРД.
 Испытания второй серии реакторов «Киви-Б» тепловой мощностью 1100 МВт, работавших на жидком водороде, продолжились в 1962 году. 1 сентября 1962 г. было проведено первое испытание нового реактора (всего испытывалось семь модификаций реактора «Киви»).
Испытания второй серии реакторов «Киви-Б» тепловой мощностью 1100 МВт, работавших на жидком водороде, продолжились в 1962 году. 1 сентября 1962 г. было проведено первое испытание нового реактора (всего испытывалось семь модификаций реактора «Киви»).
Оксид урана был заменён на более термостойкий карбид, вдобавок стержни стали покрывать карбидом ниобия, но в ходе испытания при попытках достичь проектной температуры реактор начинал разрушаться (через сопло вылетали обломки пластин). Следующий пуск состоялся 30 ноября 1962 г., но после 260 секунд работы испытание было прекращено вследствие появления внутри реактора сильной вибрации и вспышек пламени в выхлопной струе. В результате этих неудач намеченные на 1963 г. испытания реакторов «Киви-В» перенесли на следующий год. В августе 1964 г. было проведено ещё одно испытание, в ходе которого двигатель работал на мощности в 900 МВт более восьми минут, развив тягу 222,7 кН при скорости истечения 7500 м/с. В самом начале 1965 г. было проведено последнее испытание, в ходе которого реактор был разрушен. Его специально довели до взрыва в результате быстрого «разгона». Если нормально переход реактора с нулевой мощности на полную требует десятков секунд, то при этом испытании длительность такого перехода определялась лишь инерцией регулирующих стержней, и примерно через 44 миллисекунды после их перевода в положение полной мощности произошёл взрыв эквивалентный 50-60 кг тринитротолуола.
Ещё в ходе работ по программе «Ровер» в 1961 году началась разработка ЯРД «НЕРВА», предназначенного уже для лётных испытаний. В том же году были начаты работы и по ракете, предназначенной для испытаний двигателя «НЕРВА» и получившей название «Рифт» (Rift). О работах по этой ракете и о ЯРД NERVA мы расскажем в последующих обзорах.
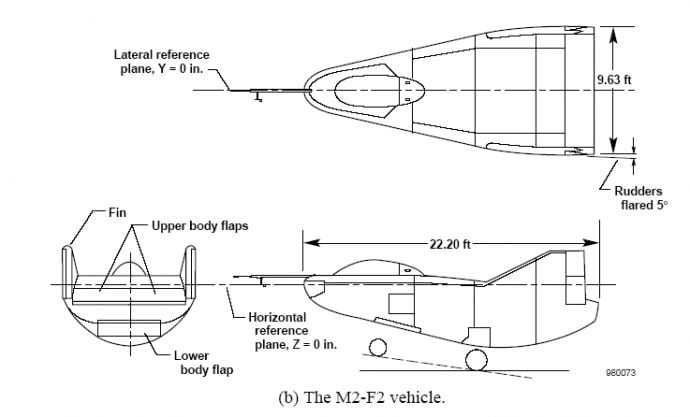
![]() 2 июля 1966 года — первый испытательный полёт экспериментального воздушно-космического самолёта M2-F2 (США).
2 июля 1966 года — первый испытательный полёт экспериментального воздушно-космического самолёта M2-F2 (США).
В начале 60-х годов многие авиационные фирмы разрабатывали проекты аэрокосмических аппаратов различного назначения: от военных ракетопланов до пассажирских сателлоидов. В сентябре 1962 года фирма «Нортроп» (Northrop) начала испытания экспериментального планера M2-F1, который должен был стать прототипом воздушно-космического самолёта.
 Этот планер был изготовлен из листов фанеры из красного дерева толщиной 2,4 мм. Для наружной обшивки использовался дакрон, покрытый специальным лаком. Внутренняя конструкция и шасси были выполнены из сварных стальных труб. На летательном аппарате M2-F1 использовалась обычная система управления планера. Для управления по тангажу применялись закрылки и наружные элевоны. Управление по крену осуществлялось за счёт дифференциального управления элевонами. Для управления по курсу служили рули направления. Вертикальные стабилизаторы, рули и элевоны изготавливались из алюминиевых листов толщиной 0,4 мм. Закрылки были сварены из алюминиевых труб и покрыты дакроном. В кабине планера устанавливалось катапультное кресло. Кабину закрывал плексигласовый колпак, применяемый на планерах и обеспечивающий пилоту хороший обзор вперёд и в стороны. Кроме того, на M2-F1 устанавливались маленькие твердотопливные двигатели тягой от 1020 до 1120 Н с временем действия 10 с. Натурный планер M2-F1 был испытан в большой аэродинамической трубе Исследовательского центра имени Эймса.
Этот планер был изготовлен из листов фанеры из красного дерева толщиной 2,4 мм. Для наружной обшивки использовался дакрон, покрытый специальным лаком. Внутренняя конструкция и шасси были выполнены из сварных стальных труб. На летательном аппарате M2-F1 использовалась обычная система управления планера. Для управления по тангажу применялись закрылки и наружные элевоны. Управление по крену осуществлялось за счёт дифференциального управления элевонами. Для управления по курсу служили рули направления. Вертикальные стабилизаторы, рули и элевоны изготавливались из алюминиевых листов толщиной 0,4 мм. Закрылки были сварены из алюминиевых труб и покрыты дакроном. В кабине планера устанавливалось катапультное кресло. Кабину закрывал плексигласовый колпак, применяемый на планерах и обеспечивающий пилоту хороший обзор вперёд и в стороны. Кроме того, на M2-F1 устанавливались маленькие твердотопливные двигатели тягой от 1020 до 1120 Н с временем действия 10 с. Натурный планер M2-F1 был испытан в большой аэродинамической трубе Исследовательского центра имени Эймса.
 Перед первым полётом M2-F1 было проведено четыре запуска РДТТ (два статических и два динамических), укреплённых на его конструкции, для демонстрации конструкционной жёсткости и влияния работающих двигателей на управляемость и устойчивость летательного аппарата. Первый динамический запуск был проведён во время наземной буксировки с поднятым передним колесом на скорости 110 км/ч. Второе испытание двигателей было проведено уже после освобождения буксировочного троса, когда летательный аппарат находился на высоте около 3 метров над поверхностью Земли и имел скорость 175 км/ч. И в первом, и во втором эксперименте никаких вредных эффектов не наблюдалось. Наоборот, пилот отметил некоторое улучшение устойчивости полёта летательного аппарата.
Перед первым полётом M2-F1 было проведено четыре запуска РДТТ (два статических и два динамических), укреплённых на его конструкции, для демонстрации конструкционной жёсткости и влияния работающих двигателей на управляемость и устойчивость летательного аппарата. Первый динамический запуск был проведён во время наземной буксировки с поднятым передним колесом на скорости 110 км/ч. Второе испытание двигателей было проведено уже после освобождения буксировочного троса, когда летательный аппарат находился на высоте около 3 метров над поверхностью Земли и имел скорость 175 км/ч. И в первом, и во втором эксперименте никаких вредных эффектов не наблюдалось. Наоборот, пилот отметил некоторое улучшение устойчивости полёта летательного аппарата.
Лётные испытания проводились на авиабазе Эдвардс. Взлёт осуществлялся со дна высохшего озера, а сам полёт выполнялся по кругу с таким расчётом, чтобы летательный аппарата мог сесть на это дно в случае обрыва троса при наборе высоты. Отсоединение планера от самолёта-буксировщика осуществлялось на высоте 3000-3900 метров, откуда совершалось свободное планирование.
 Весной 1964 года НАСА приняло решение о необходимости продолжения работ по созданию летательных аппаратов с несущим корпусом для изучения их поведения на сверхзвуковых скоростях. В апреле были отобраны два проекта, представленные фирмой «Нортроп». Первый представлял собой улучшенный вариант планера M2 — M2-F2, дооснащённый ракетным двигателем. Другим проектом стал HL-10, разработанный в исследовательском центре Лэнгли. На аппарате M2-F2 весом 2,5 тонны устанавливался ЖРД XLR-11 (такой же, что и на ракетоплане Х-1) тягой 26500 Н (обзор №1-03 1–15.12.2015), работающий на этиловом спирте и жидком кислороде. Ракетоплан доставлялся самолётом В-52 и сбрасывался на высоте 14 км. Управление M2-F2 осуществлялось аэродинамическими рулями, расположенными в хвостовой части, продольное управление — элевонами, поперечное — дифференциальным отклонением поверхностей. Путевое управление осуществлялось расщепляющимися рулями, которые могли быть использованы и в качестве воздушных тормозов.
Весной 1964 года НАСА приняло решение о необходимости продолжения работ по созданию летательных аппаратов с несущим корпусом для изучения их поведения на сверхзвуковых скоростях. В апреле были отобраны два проекта, представленные фирмой «Нортроп». Первый представлял собой улучшенный вариант планера M2 — M2-F2, дооснащённый ракетным двигателем. Другим проектом стал HL-10, разработанный в исследовательском центре Лэнгли. На аппарате M2-F2 весом 2,5 тонны устанавливался ЖРД XLR-11 (такой же, что и на ракетоплане Х-1) тягой 26500 Н (обзор №1-03 1–15.12.2015), работающий на этиловом спирте и жидком кислороде. Ракетоплан доставлялся самолётом В-52 и сбрасывался на высоте 14 км. Управление M2-F2 осуществлялось аэродинамическими рулями, расположенными в хвостовой части, продольное управление — элевонами, поперечное — дифференциальным отклонением поверхностей. Путевое управление осуществлялось расщепляющимися рулями, которые могли быть использованы и в качестве воздушных тормозов.
В 1966-1967 годах на M2-F2 было выполнено 15 испытательных полётов, и началась подготовка к лётным испытаниям с ракетным двигателем. ЖРД должен был позволить аппарату набрать самостоятельно высоту около 24400 м и развить скорость до 2200 км/ч. Однако, 10 мая 1967 года в шестнадцатом полёте аппарат M2-F2 потерпел катастрофу при посадке, пилот при этом серьёзно пострадал. Специалистам фирмы «Нортроп» пришлось делать новый аппарат, получивший обозначение M2-F3. Его характеристики: полная длина — 6,8 м, максимальный диаметр — 2,9 м; полная масса — 3600 кг; масса топлива — 1300 кг; тяга ракетного двигателя — 26500 Н; компоненты ракетного топлива — жидкий кислород и этиловый спирт.
 Полёты нового ракетоплана начались в июле 1970 года и завершились 21 декабря 1972 года, когда программа была закрыта. Всего M2-F3 совершил 43 полёта, в том числе с включённым ракетным двигателем. В ходе испытаний удалось получить скорость 1,6М и достичь высоты 21800 м.
Полёты нового ракетоплана начались в июле 1970 года и завершились 21 декабря 1972 года, когда программа была закрыта. Всего M2-F3 совершил 43 полёта, в том числе с включённым ракетным двигателем. В ходе испытаний удалось получить скорость 1,6М и достичь высоты 21800 м.
Вторым проектом фирмы «Нортроп», получившим одобрение НАСА, стал аппарат HL-10, внешне походивший на аппарат M2-F2. Характеристики HL-10: длина — 6,75 м; максимальный диаметр — 4,6 м; максимальный вес (с баками водяного балласта) — 4082 кг; вес топлива — 1300 кг. На HL-10 устанавливался тот же ЖРД XLR-11. Первые испытания осуществлялись без включения ракетного двигателя, полёт осуществлялся за счёт планирования после отделения от самолёта-носителя. Первый полёт аппарата HL-10 состоялся 22 декабря 1966 года, последний (тридцать седьмой) — 17 июля 1970 года. В ходе испытаний была достигнута скорость 1,86М и высота 27700 м.
Летом 1970 года программа испытаний HL-10 была официально объявлена закрытой в связи с сокращением финансирования. Результаты, полученные при испытаниях аппаратов HL-10, M2-F2 и M2-F3, были впоследствии использованы при разработке концепции космоплана Х-30.
![]() 7 июля 1998 года — первый запуск из подводного положения ракетой-носителем «Штиль» спутников на орбиту ИСЗ (Россия).
7 июля 1998 года — первый запуск из подводного положения ракетой-носителем «Штиль» спутников на орбиту ИСЗ (Россия).
Одним из перспективных направлений в области использования космоса становится разработка и производство ракет-носителей лёгкого класса для запуска малых космических аппаратов различного назначения (связи, навигации, разведывательных) массой в пределах 100-2500 кг. В основном, малые спутники будут выводиться на низкую околоземную орбиту и только 10-15% из них на геостационарную.  Возникла реальная возможность и целесообразность использования для этих целей межконтинентальных баллистических ракет (МБР) и ракет, размещённых на подводных лодках (БРПЛ). Для запуска космических объектов могут быть использованы МБР и БРПЛ, снимаемые с боевого дежурства как в связи с истечением сроков эксплуатации, так и в связи с реализацией международных договоров о сокращении стратегических наступательных вооружений. Использование боевых ракет для решения народнохозяйственных задач может быть целесообразным для промышленного производства в космосе уникальных материалов и лекарственных препаратов, оказания оперативной помощи терпящим бедствие в отдалённых районах Земли. Двойное применение боевых ракет является одним из направлений конверсии оборонного комплекса страны и позволяет не только компенсировать затраты на их ликвидацию, но и получить значительный экономический эффект. Особенно эффективно применение «конверсионных» ракет-носителей в случае их старта с борта корабля, так как в этом случае можно подобрать удобную стартовую позицию почти в любой точке мирового океана и осуществлять пуски на любые наклонения орбит. Правда, на этом пути могут встречаться «подводные» камни.
Возникла реальная возможность и целесообразность использования для этих целей межконтинентальных баллистических ракет (МБР) и ракет, размещённых на подводных лодках (БРПЛ). Для запуска космических объектов могут быть использованы МБР и БРПЛ, снимаемые с боевого дежурства как в связи с истечением сроков эксплуатации, так и в связи с реализацией международных договоров о сокращении стратегических наступательных вооружений. Использование боевых ракет для решения народнохозяйственных задач может быть целесообразным для промышленного производства в космосе уникальных материалов и лекарственных препаратов, оказания оперативной помощи терпящим бедствие в отдалённых районах Земли. Двойное применение боевых ракет является одним из направлений конверсии оборонного комплекса страны и позволяет не только компенсировать затраты на их ликвидацию, но и получить значительный экономический эффект. Особенно эффективно применение «конверсионных» ракет-носителей в случае их старта с борта корабля, так как в этом случае можно подобрать удобную стартовую позицию почти в любой точке мирового океана и осуществлять пуски на любые наклонения орбит. Правда, на этом пути могут встречаться «подводные» камни.
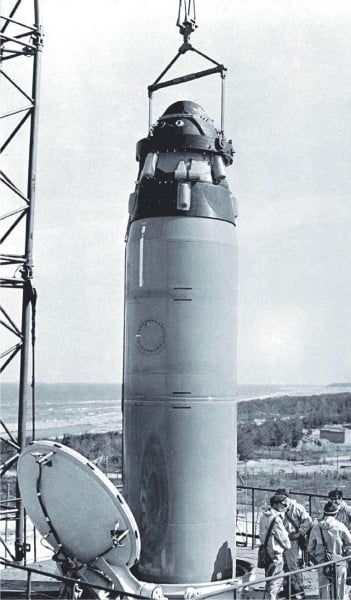 РН «Штиль» создана в ОАО «ГРЦ имени академика В. П. Макеева». Предназначена для выведения малоразмерных КА на околоземную орбиту высотой 500 км. Ракета имеет три ступени и работает на высококипящих компонентах топлива (НДМГ+АТ). Пуски РН могут производиться из шахт ПЛ в подводном и надводном положении, а также с наземного стартового комплекса. РН «Штиль» представляет собой серийную БРПЛ Р-29РМ с дополнительно установленной телеметрической аппаратурой. Полезная нагрузка объёмом до 0,183 м3 размещается в штатном отсеке ракеты. Ракета позволяет обеспечивать запуск космических аппаратов массой до 70 кг на круговую орбиту высотой 400 км и наклонением 79°. Первый пуск РН «Штиль» был произведён 7 июля 1998 года с борта ПЛ К-407 «Новомосковск». На околоземную орбиту были выведены малые КА Tubsat-N и Tubsat-N1 массой 8,5 и 3 кг соответственно, изготовленные в Берлинском техническом университете.
РН «Штиль» создана в ОАО «ГРЦ имени академика В. П. Макеева». Предназначена для выведения малоразмерных КА на околоземную орбиту высотой 500 км. Ракета имеет три ступени и работает на высококипящих компонентах топлива (НДМГ+АТ). Пуски РН могут производиться из шахт ПЛ в подводном и надводном положении, а также с наземного стартового комплекса. РН «Штиль» представляет собой серийную БРПЛ Р-29РМ с дополнительно установленной телеметрической аппаратурой. Полезная нагрузка объёмом до 0,183 м3 размещается в штатном отсеке ракеты. Ракета позволяет обеспечивать запуск космических аппаратов массой до 70 кг на круговую орбиту высотой 400 км и наклонением 79°. Первый пуск РН «Штиль» был произведён 7 июля 1998 года с борта ПЛ К-407 «Новомосковск». На околоземную орбиту были выведены малые КА Tubsat-N и Tubsat-N1 массой 8,5 и 3 кг соответственно, изготовленные в Берлинском техническом университете.
Второй запуск РН «Штиль» состоялся 27 мая 2006 года с борта ПЛ К-84 «Екатеринбург». На солнечно-синхронную орбиту был выведен КА «КОМПАС-2» массой 80 кг.
Основные технические характеристики ракеты «Штиль»: длина — 14,8 м; диаметр — 1,9 м; стартовый вес — 40,3 т.
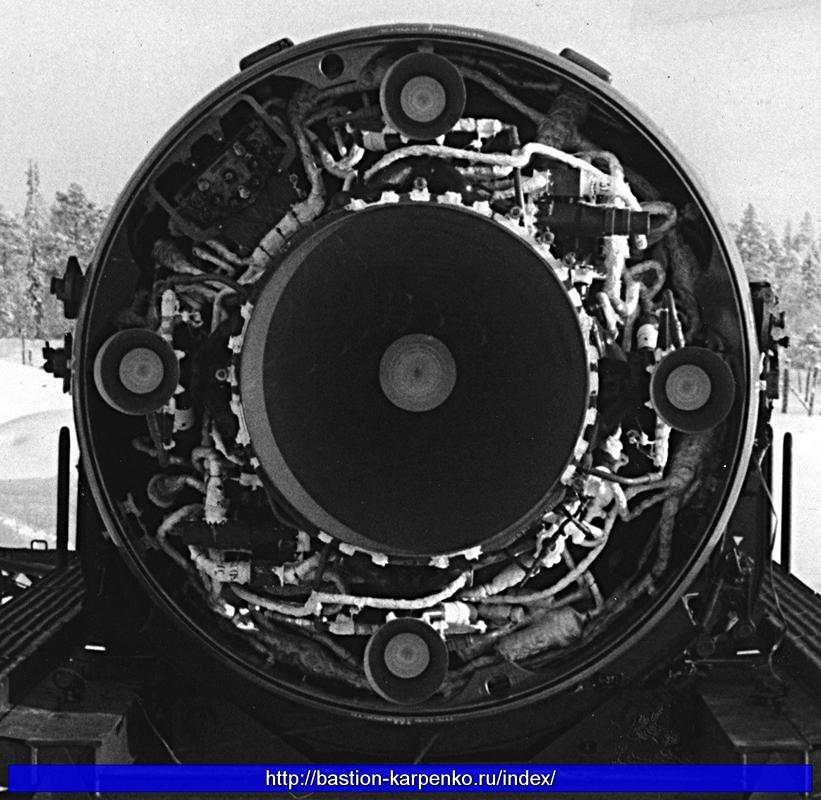
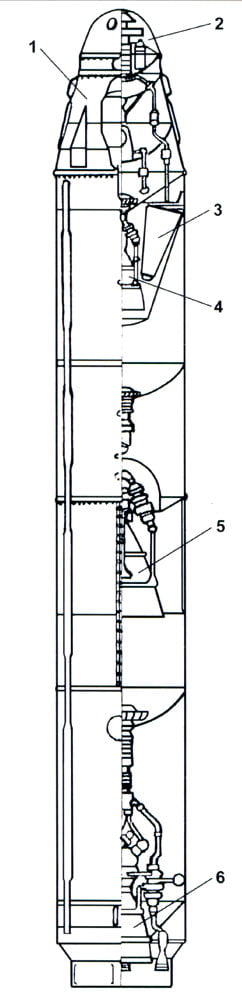
А теперь, немного о боевом «прародителе» РН «Штиль». История БРПЛ Р-29 началась ещё в 1963 году. Головным разработчиком ракеты и комплекса Д-9 было назначено СКБ-385, главный конструктор В. П. Макеев. Разработчиком двигателей 1-й и 2-й ступеней было назначено ОКБ-2, главный конструктор А. М. Исаев. Ракета Р-29 была выполнена по двухступенчатой схеме с отделяемой моноблочной головной частью (ГЧ). Моноблочная ГЧ с ядерным зарядом мощностью 1 мегатонна имела форму конуса со сферическим затуплением спереди. Она размещалась в баке горючего 2-й ступени и устанавливалась в «перевёрнутом» относительно направления полёта положении. Сфероконический приборный отсек с аппаратурой управления размещался в объёме, образованном головным обтекателем и задней частью боеголовки. Разделение ступеней осуществлялось с помощью детонирующих удлинённых зарядов и энергии газов наддува баков.
 Для получения необходимой точности стрельбы впервые для баллистической ракеты в СССР была применена система азимутальной астрокоррекции (коррекция плоскости полёта по звёздным ориентирам). Также впервые была применена бортовая цифровая вычислительная машина. Комплекс Д-9 был принят на вооружение ВМФ в марте 1974 года.
Для получения необходимой точности стрельбы впервые для баллистической ракеты в СССР была применена система азимутальной астрокоррекции (коррекция плоскости полёта по звёздным ориентирам). Также впервые была применена бортовая цифровая вычислительная машина. Комплекс Д-9 был принят на вооружение ВМФ в марте 1974 года.
Через несколько лет после принятия на вооружение комплекса Д-9, начались работы по его модернизации, в результате чего появился комплекс Д-9Р (принят на вооружение в 1978 году). Конструктивные и технологические решения по комплексу Д-9 использовались максимально. На ракете Р-29Р (РСМ-50) была использована конструкция корпуса первых двух ступеней от Р-29, а двигатели 1-й и 2-й ступеней также подверглись модернизации. Ракета получила разделяющуюся головную часть с блоками индивидуального наведения. Точность стрельбы была повышена в два раза благодаря использованию новой азимутальной астрокоррекции. Дальность стрельбы была увеличена с 7800 км до 9100 км. Ракета Р-29Р «конвертировалась» в РН «Волна», о которой мы расскажем в последующих обзорах.
 В 1979 году начались работы по новой межконтинентальной ракете Р-29РМ (РСМ-54) комплекса Д-9РМ. Ракета была спроектирована по трёхступенчатой схеме с маршевыми двигателями, «утопленными» в топливных баках ракеты. Двигательные установки третьей ступени и головной части были объединены в единую сборку с общей баковой системой. После доработки ракеты и корабельных испытаний на подводных лодках в 1986 году комплекс Д-9РМ был принят на вооружение.
В 1979 году начались работы по новой межконтинентальной ракете Р-29РМ (РСМ-54) комплекса Д-9РМ. Ракета была спроектирована по трёхступенчатой схеме с маршевыми двигателями, «утопленными» в топливных баках ракеты. Двигательные установки третьей ступени и головной части были объединены в единую сборку с общей баковой системой. После доработки ракеты и корабельных испытаний на подводных лодках в 1986 году комплекс Д-9РМ был принят на вооружение.
Новые технические решения, реализованные в ракете и комплексе: оснащение ракеты высокоточной астрорадио-инерциальной системой управления, использование «гибких» траекторий и радиокоррекции по ИСЗ, что повысило точность стрельбы, соизмеримую со стационарными межконтинентальными баллистическими ракетами; использование различных типов траекторий полёта на минимальную и промежуточную дальности стрельбы; применение произвольной зоны разведения боевых блоков; расширены возможности боевого применения из высоких широт Арктики. На первой ступени ракеты применён пятикамерный ЖРД РД-0243 (разработчик КБХА, гл. конструктор В. П. Козелков) с одной основной камерой сгорания и четырьмя рулевыми. Двигатель выполнен по замкнутой схеме (с дожиганием генераторного газа турбонасосного агрегата). 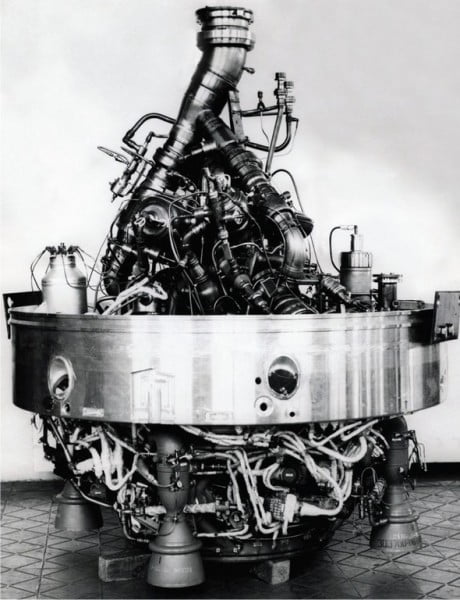 Двигательный блок состоит из основного двигателя РД-0244 и рулевого РД-0245. По своим энергомассовым характеристикам двигатели являются наиболее совершенными из всех существующих двигателей такого класса, что было обеспечено реализацией новых прогрессивных решений: высокое давление в камере сгорания основного двигателя РД-0244, выполненного по замкнутой схеме; замкнутая схема рулевого двигателя РД-0245 с оригинальным малогабаритным узлом, обеспечивающим подвод окислительного газа к камерам сгорания и их качание; запуск обоих двигателей от одной команды системы управления; размещение («утопление») большей части двигателей в баке горючего. Двигатели для второй, третьей и боевой ступеней ракеты Р-29РМ разработаны КБ химического машиностроения имени А. М. Исаева. На второй ступени установлен однокамерный ЖРД с дожиганием окислительного генераторного газа и с поворотной в двух плоскостях камерой сгорания, для управления по крену введены сопла для перепуска газа от ТНА. Двигатель второй ступени размещается в баках окислителя первой и второй ступеней ракеты, время выхода двигателя на режим — 0,03-0,13 секунды. Третья ступень ракеты оснащена однокамерным ЖРД с дожиганием окислительного генераторного газа. Двигатель ступени разведения боевых блоков — четырёхкамерный ЖРД с ТНА открытой схемы, трёхрежимный с многократным переключением режимов (ещё 6 сопел работают непрерывно), с автоматом регулирования режимов работы — управляет третьей ступенью ракеты. Поскольку комплекс Д-9РМ продолжает оставаться на вооружении, технические характеристики двигателей ракеты Р-9РМ в открытых публикациях не разглашаются.
Двигательный блок состоит из основного двигателя РД-0244 и рулевого РД-0245. По своим энергомассовым характеристикам двигатели являются наиболее совершенными из всех существующих двигателей такого класса, что было обеспечено реализацией новых прогрессивных решений: высокое давление в камере сгорания основного двигателя РД-0244, выполненного по замкнутой схеме; замкнутая схема рулевого двигателя РД-0245 с оригинальным малогабаритным узлом, обеспечивающим подвод окислительного газа к камерам сгорания и их качание; запуск обоих двигателей от одной команды системы управления; размещение («утопление») большей части двигателей в баке горючего. Двигатели для второй, третьей и боевой ступеней ракеты Р-29РМ разработаны КБ химического машиностроения имени А. М. Исаева. На второй ступени установлен однокамерный ЖРД с дожиганием окислительного генераторного газа и с поворотной в двух плоскостях камерой сгорания, для управления по крену введены сопла для перепуска газа от ТНА. Двигатель второй ступени размещается в баках окислителя первой и второй ступеней ракеты, время выхода двигателя на режим — 0,03-0,13 секунды. Третья ступень ракеты оснащена однокамерным ЖРД с дожиганием окислительного генераторного газа. Двигатель ступени разведения боевых блоков — четырёхкамерный ЖРД с ТНА открытой схемы, трёхрежимный с многократным переключением режимов (ещё 6 сопел работают непрерывно), с автоматом регулирования режимов работы — управляет третьей ступенью ракеты. Поскольку комплекс Д-9РМ продолжает оставаться на вооружении, технические характеристики двигателей ракеты Р-9РМ в открытых публикациях не разглашаются.
 Для ракеты Р-29РМ в НИИ автоматики была создана астроинерциальная система управления ракеты. На ракету Р-29РМ могут вводится данные от космической навигационной системы «Глонас» для коррекции полёта. Решающим фактором, позволившим обеспечить точность стрельбы морских ракет на уровне лучших зарубежных аналогов и современных стратегических ракет наземного базирования, явилось внедрение, впервые в мире, навигации по искусственным спутникам Земли. Именно при создании ракеты Р-29РМ по инициативе её разработчиков начала создаваться глобальная навигационная спутниковая система в то время с шифром «Ураган». Требования к системе «Ураган», разработанные исходя из интересов создания высокоточного комплекса Д-9РМ, легли в основу тактико-технического задания на разработку этой системы. Первый приёмник сигналов системы «Ураган» весил 28 кг, что весьма значимо для использования на морских ракетах, но его применение в составе бортовой системы управления было признано оправданным, и точность стрельбы ракет комплекса Д-9РМ, а также всех его модернизированных вариантов до настоящего времени остаётся на уровне, обеспечивающем паритет с зарубежными морскими ракетами.
Для ракеты Р-29РМ в НИИ автоматики была создана астроинерциальная система управления ракеты. На ракету Р-29РМ могут вводится данные от космической навигационной системы «Глонас» для коррекции полёта. Решающим фактором, позволившим обеспечить точность стрельбы морских ракет на уровне лучших зарубежных аналогов и современных стратегических ракет наземного базирования, явилось внедрение, впервые в мире, навигации по искусственным спутникам Земли. Именно при создании ракеты Р-29РМ по инициативе её разработчиков начала создаваться глобальная навигационная спутниковая система в то время с шифром «Ураган». Требования к системе «Ураган», разработанные исходя из интересов создания высокоточного комплекса Д-9РМ, легли в основу тактико-технического задания на разработку этой системы. Первый приёмник сигналов системы «Ураган» весил 28 кг, что весьма значимо для использования на морских ракетах, но его применение в составе бортовой системы управления было признано оправданным, и точность стрельбы ракет комплекса Д-9РМ, а также всех его модернизированных вариантов до настоящего времени остаётся на уровне, обеспечивающем паритет с зарубежными морскими ракетами.
 |
|
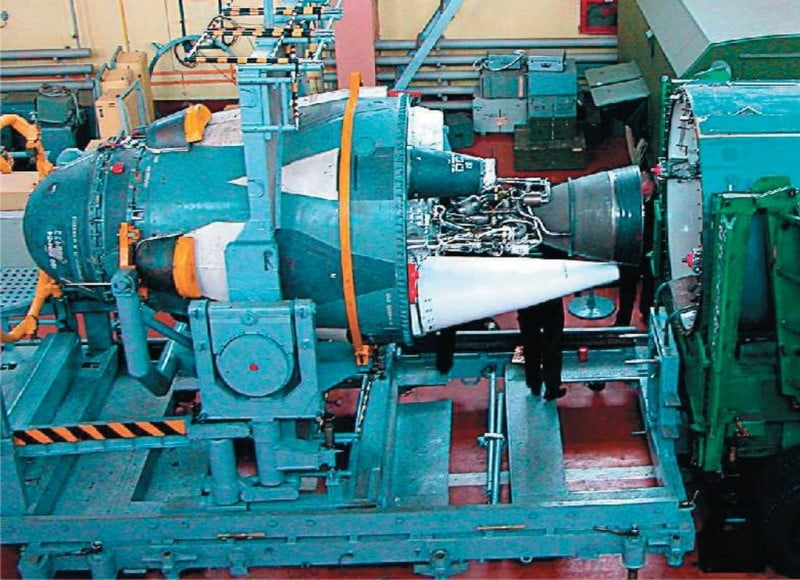
БРПЛ Р-29РМ (РСМ-54): |
БРПЛ могла оснащаться как четырёхблочной, так и десятиблочной РГЧ. В соответствии с Договором СНВ-1 устанавливается только четырёхблочная РГЧ. Ракета Р-29РМ разрабатывалась с боевым оснащением двумя вариантами боевых блоков индивидуального наведения среднего и малого классов мощности. Боеприпас среднего класса мощности разрабатывался с учётом его использования в составе комплекса Д-9РК. Вторым вариантом стал высокоскоростной малогабаритный боевой блок малого класса мощности. В этом варианте применён термоядерный боезаряд, созданный совместными усилиями ВНИИ технической физики и ВНИИ экспериментальной физики. Заряд в полной мере соответствовал поставленным требованиям по мощности, весогабаритным и центровочным характеристикам. Размещение заряда и спецавтоматики в корпусе, разработанном КБ машиностроения и использующем углерод-углеродные материалы, позволило в совокупности создать ядерный боеприпас (боевой блок) на уровне характеристик лучшего зарубежного аналога — боеголовки Мк-76. Ядерный боеприпас малого класса мощности ракеты Р-29РМ (главный конструктор В. А. Верниковский) разработан с применением нового малогабаритного термоядерного заряда повышенной мощности.
При подготовке материалов были использованы следующие источники:
- А. М. Первушин. Битва за звезды: Космическое противостояние. — М.: ООО «Издательство АСТ», 2003.
- И. Г. Паневин, В. И. Прищепа, В. Н. Хазов. Космические ядерные ракетные двигатели. — М.: Издательство «Знание», 1978.
- David Darling. The Complete Book of Spaceflight From Apollo 1 to Zero Gravity. — John Wiley & Sons, Inс., Hoboken, New Jersey, 2003.
- В. П. Лукашевич, И. Б. Афанасьев. Космические крылья. — М.: ООО «ЛенТа Странствий», 2009.
- Журнал «Техника-молодежи», №3, 1968.
- И. Б. Афанасьев, А. Н. Лавренов. Большой космический клуб. — М.: «РТСофт», 2006.
- А. Б. Широкорад. Оружие отечественного флота. 1945-2000. — Мн.: «Харвест», 2001.
- http://bastion-karpenko.ru/d-9rm/ВТС«БАСТИОН»A.V.Karpenko
| « | В этот день… №3-24 (21-30 июня) | В этот день… №3-26 (11-20 июля) | » |

