В этот день… №2-26 (11-20 июля)
 Жара! Июль! Интересно, а как там, на Марсе, летом? Ответ на этот и многие другие вопросы был получен именно в июле. А ещё в июле начались лётные испытания транспортного корабля, который так и не был использован в пилотируемом варианте.
Жара! Июль! Интересно, а как там, на Марсе, летом? Ответ на этот и многие другие вопросы был получен именно в июле. А ещё в июле начались лётные испытания транспортного корабля, который так и не был использован в пилотируемом варианте.
![]() 17 июля 1977 года — запущен первый транспортный корабль снабжения (ТКС, «Космос-929») (СССР).
17 июля 1977 года — запущен первый транспортный корабль снабжения (ТКС, «Космос-929») (СССР).
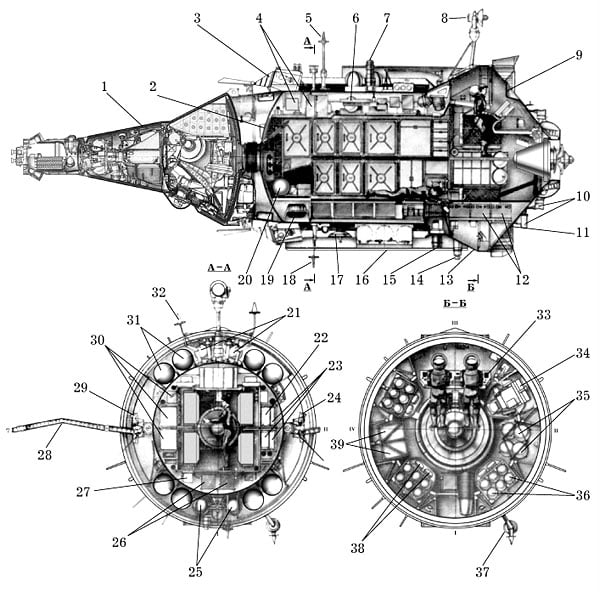
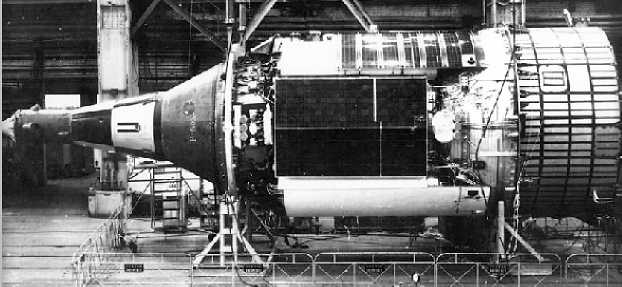
Ракетно-космический комплекс «Алмаз», разрабатываемый специалистами ОКБ-52 с середины 60-х годов ХХ века, должен был состоять из орбитальной пилотируемой станции (ОПС) 11Ф71 (обзор №1-18 1–10.07.2016), транспортного корабля снабжения 11Ф72, РН УР-500К, технической и стартовой позиций, наземного пункта приёма информации и сети наземных пунктов командно-измерительного комплекса (КИК) для управления станцией. ТКС, в свою очередь состоял из функционально-грузового блока (ФГБ) 11Ф77 и возвращаемого аппарата (ВА) 11Ф74.
 Разработкой ТКС с 1968 года занималось ОКБ «Салют» (в то время ОКБ-23), которое входило в состав ОКБ-52 в качестве филиала №1. Генеральным конструктором ОКБ-52 являлся академик В. Н. Челомей, начальником филиала №1 — В. Н. Бугайский.
Разработкой ТКС с 1968 года занималось ОКБ «Салют» (в то время ОКБ-23), которое входило в состав ОКБ-52 в качестве филиала №1. Генеральным конструктором ОКБ-52 являлся академик В. Н. Челомей, начальником филиала №1 — В. Н. Бугайский.
Для обеспечения постоянного функционирования ОПС на околоземной орбите в составе комплекса «Алмаз» предусматривалось запускать ТКС с периодичностью один раз в три месяца. Корабль должен был выполнять следующие задачи:
- сближение и стыковку с ОПС в качестве активного корабля;
- доставку на ОПС и возврат на Землю в ВА экипажей космонавтов (трёх человек);
- доставку на ОПС средств жизнеобеспечения космонавтов, расходных материалов, грузов и аппаратуры для проведения наблюдений, регламентных и ремонтных работ;
- доставку на ОПС возвращаемых спецкапсул (до 7 единиц) для сброса фотоматериалов с информацией на Землю;
- управление в течение 90 суток полётом комплекса в конфигурации сборок ОПС+ТКС или ОПС+ФГБ (ориентация, стабилизация, подъём орбиты);
- обеспечение начальных условий для отделения ВА как в автономном полёте ТКС, так и полёте в составе орбитального комплекса;
- отделение от ОПС, увод с орбиты ФГБ.
Возвращаемый аппарат разрабатывался ОКБ-52 как многоразовый аппарат (по ТЗ до 10 запусков). Выведение на околоземную орбиту предусматривалось на РН «Протон-К» (УР-500К). При проектировании и разработке эскизного проекта ТКС инженеры ОКБ встретили много объективных трудностей: освоение космоса только начиналось. Практического опыта не было ни в США, ни в СССР.
 |
|
Компоновка ТКС: |
По многим техническим проблемам, связанным с неопределённостями функционирования в условиях космического пространства, были приняты универсальные решения, а где это возможно — решения, позволяющие иметь некоторую адаптивность под неопределённую ситуацию, были внедрены решения по необходимому внутрисистемному и функциональному резервированию для повышения надёжности работы систем и оборудования. Такой подход обеспечил универсальность и живучесть конструкции корабля во многих последующих проектах («Мир» и МКС).
При создании ФГБ ТКС были реализованы уникальные по своим идеям и методам реализации технические решения. К их числу относятся следующие разработки:
- механизм для стыковки на орбите КК с массой 20 т и необходимой электроавтоматикой пневмоуправления работой механизма стыковки;
- складные, автоматически раскрывающиеся и ориентируемые в полёте солнечные батареи большой площади;
- двигательная установка с большим запасом топлива (~3830 кг);
- выработка топлива из баков с металлическими сильфонными вытеснителями;
- использование двигателей коррекции (тягой 4000 Н) с ТНА;
- использование двухпоясной схемы расположения двигателей ориентации (относительно центра масс), обеспечивающей необходимое резервирование и хорошие динамические характеристики активного корабля на участке сближения и стыковки с орбитальной станцией;
- использование ручных средств управления движением при сближении;
- аналого-цифровая система управления ФГБ, обеспечивающая управляемость как в автономном полёте ТКС, так и в совместном с ОПС.
В цифровом контуре управления ФГБ, который решал задачи наведения, сближения и стыковки с ОПС, была применена бортовая цифровая вычислительная машина «Аргон-16».
 Стыковка ТКС с орбитальной станцией предусматривалась как полностью в автоматическом режиме (при нахождении экипажа в ВА), так и в ручном режиме с участием экипажа. Для экипажа в районе заднего конического днища были предусмотрены два рабочих места, на которых установлены пульты с необходимой информацией и органами управления.
Стыковка ТКС с орбитальной станцией предусматривалась как полностью в автоматическом режиме (при нахождении экипажа в ВА), так и в ручном режиме с участием экипажа. Для экипажа в районе заднего конического днища были предусмотрены два рабочих места, на которых установлены пульты с необходимой информацией и органами управления.
Визуальный обзор штанги механизма стыковки ТКС, прицельной рамки, а также хвостовой части орбитальной станции с установленной пассивной частью механизма стыковки и мишенями прицеливания можно было вести через два иллюминатора диаметром 400 мм, вмонтированных в коническое днище. При ручной стыковке третий член экипажа должен был находиться в ВА с целью поддержки для случая срочной эвакуации в ВА членов экипажа, находившихся на рабочих местах в ФГБ. Перемещение экипажа из ФГБ в ВА производилось через сильфон диаметром 550 мм, запираемый с обеих сторон крышками гермолюков, монтируемых на днище ВА и сферическом днище гермоотсека ФГБ. При отделении ВА от ФГБ после закрытия люков сильфон из нержавеющей стали разделялся по фланцу с помощью специального механизма, а трубопроводы и кабели перерезались с помощью пирогильотины.
После катастрофы с экипажем «Союза-11» (обзор №1-17 21–30.06.2016), а также неудачи с выведением на орбиту второй орбитальной станции «Салют» 29 июля 1972 года руководством было принято решение о запуске ОПС «Алмаз». Необходимо было опередить американцев, готовивших к запуску ОС «Скайлэб» в апреле 1973 года. Первые ОПС не оснащались ВА, он не был ещё готов. Доставка экипажей планировалась транспортным кораблём «Союз».
 Запуск «Салюта-2» (ОПС-1 «Алмаз») 3.04.1973 был неудачным, станция на 13-е сутки полёта разгерметизировалась. Полёт очередного «Салюта» (ДОС-3) также был неудачным: из-за отказа ионного датчика управления курсом и тангажом было выработано всё топливо. Станцию пришлось спустить в акваторию океана. Так из четырёх пусков орбитальных станций с апреля 1971 г. по май 1973 г. все четыре были неудачными!
Запуск «Салюта-2» (ОПС-1 «Алмаз») 3.04.1973 был неудачным, станция на 13-е сутки полёта разгерметизировалась. Полёт очередного «Салюта» (ДОС-3) также был неудачным: из-за отказа ионного датчика управления курсом и тангажом было выработано всё топливо. Станцию пришлось спустить в акваторию океана. Так из четырёх пусков орбитальных станций с апреля 1971 г. по май 1973 г. все четыре были неудачными!
После полностью успешного полёта «Салюта-3», т.е. ОПС-2 «Алмаз» (обзор №1-18 1–10.07.2017) было принято решение о продолжении проекта «Алмаз» во второй фазе. 19 января 1976 г. ЦК КПСС и Совет Министров СССР выпустили Постановление №476-13 «О продолжении работы по «Алмазу» и ТКС».
Исходно планировалось шесть полномасштабных полётов ТКС (два беспилотных и четыре пилотируемых), а также девять беспилотных запусков капсул ВА начиная с I квартала 1976 года. Беспилотные ЛКИ намечалось начать в конце 1976 года, пилотируемые полёты ТКС — в конце 1978 года. Принятие в эксплуатацию РКК «Алмаз» планировалось в конце 1980 года, после проведения ЛКИ всего комплекса. Пилотируемые ТКС должны были стыковаться с ОПС-4.
 Отработка возвращаемого аппарата комплекса «Алмаз» являлась наиболее сложной задачей, т.к. она требовала значительных ресурсов и времени. Для обеспечения безопасности космонавтов необходимо было в условиях, максимально приближенных к реальным, провести комплексную отработку ВА в беспилотном режиме. Необходимо было провести отработки систем разделения, системы аварийного спасения, тормозной двигательной установки, спуска ВА с орбиты, средств посадки ВА, систем жизнеобеспечения и др.
Отработка возвращаемого аппарата комплекса «Алмаз» являлась наиболее сложной задачей, т.к. она требовала значительных ресурсов и времени. Для обеспечения безопасности космонавтов необходимо было в условиях, максимально приближенных к реальным, провести комплексную отработку ВА в беспилотном режиме. Необходимо было провести отработки систем разделения, системы аварийного спасения, тормозной двигательной установки, спуска ВА с орбиты, средств посадки ВА, систем жизнеобеспечения и др.
На заводе им. Хруничева было изготовлено около 50-ти корпусов ВА, в том числе для проведения различных испытаний, которые были проведены в 1974-1978 гг.
При испытаниях системы аварийного спасения с командного пункта выдавалась команда «Авария», после чего происходил запуск одновременно пороховых двигателей аварийной и тормозной ДУ общей тягой 843 кН. По штатной циклограмме срабатывали все элементы системы разделения, и ВА поднимался на высоту около 2 км. Пиропушка выстреливала вытяжной парашют, который вытягивал тормозной, а тот — три посадочных купола, после чего ВА совершал мягкую посадку на парашютах в 1,5–2 км от места испытаний. При спуске, на высоте 1–1,5 м от земли, срабатывали двигатели мягкой посадки.
ВА проходил испытания в виде лётно-весового изделия (ЛВИ) 82ЛБ72. На ЛВИ устанавливались два ВА. Отработка ЛВИ на РН «Протон-К» проводились по штатной программе выведения ТКС, сброс АДУ САС — штатно на активном участке с выведением ЛВИ на круговую орбиту высотой 200-220 км. Затем по программе отработки производилось отделение и разведение ВА. Верхний аппарат отделялся штатно пружинными толкателями после срабатывания пирозамков. Затем после срабатывания пирозамков по штатному стыку с РН, производилось разведение корпуса ЛВИ и второго ВА, установленного на проставке с помощью пружинных толкателей.
После одновиткового орбитального полёта, перед спуском на Землю, каждый ВА с помощью собственных двигателей ориентировались и в требуемой точке схода выдавали тормозной импульс с помощью пороховой тормозной двигательной установки ВА и совершали посадку в заданном районе.
 Первый пуск (ЛВИ-1) был осуществлён 15 декабря 1976 года с космодрома Байконур. Оба ВА, упоминаемых в прессе как «Космос-881» и «Космос-882», выполнив одновитковый полёт, успешно совершили посадку в заданном районе.
Первый пуск (ЛВИ-1) был осуществлён 15 декабря 1976 года с космодрома Байконур. Оба ВА, упоминаемых в прессе как «Космос-881» и «Космос-882», выполнив одновитковый полёт, успешно совершили посадку в заданном районе.
Во время второго пуска (ЛВИ-2) 5 августа 1977 года из-за аварии РН «Протон-К» ВА не были выведены на орбиту, но эта неудача позволила провести отработку системы аварийного спасения и проверить систему отделения ВА ТКС. Верхний ВА, установленный штатно, отделился от аварийной РН и совершил штатную посадку в безопасном районе.
Третий пуск ЛВИ был произведён 30 марта 1978 года и был завершён успешной посадкой двух ВА в заданном районе. Эти ВА получили название «Космос-997» и «Космос-998».
Во время четвёртого пуска (ЛВИ-4) 23 мая 1979 года, который получил название в прессе как запуск двух аппаратов «Космос-1100» и «Космос-1101», было отработано штатное отделение ВА и ориентированный вход обоих аппаратов в плотные слои атмосферы. Однако, из-за неполадок в системе бортовой автоматики, посадка одного из ВА прошла нештатно.
В процессе отработки ВА по программе ЛВИ один из возвращаемых аппаратов использовался трижды: дважды спустившись с орбиты как «Космос-881» (ЛВИ-1) и «Космос-997» (ЛВИ-3), что говорит об уникальности конструкции и технологии восстановления теплозащиты ВА.
Таким образом, ко времени первого полёта ТКС ВА в основном был отработан.
Первый лётный ФГБ для ТКС был изготовлен на ЗИХ и в июле 1975 года поступил на электрические испытания в опытное производство ОКБ-23. Огромный вклад в электроиспытания внесли специалисты КБЭ (г. Харьков, главный конструктор — В. Г. Сергеев).
В конце декабря 1976 года электрические испытания были завершены и первый лётный ФГБ был отправлен на Байконур. ВА на Байконур прибыл позднее. В январе 1977 года ФГБ был установлен на рабочее место на технической позиции площадки №92-2 в лабораторном корпусе (там готовились все ОПС и ТКС). Техническим руководителем по подготовке ФГБ был назначен ведущий специалист А. К. Недайвода, по ВА Б. И. Шехирев. Техническую экспедицию специалистов по системе управления (СУ) от КБ «Электроприбор» возглавил главный конструктор А. С. Гончар.
ТКС №16101 («Космос-929») был запущен 17 июля 1977 года. Программой полёта предусматривались интенсивные маневрирования с целью отработки СУ и ДУ, присущие активному кораблю. Возвращаемый аппарат (серийный номер 009) был спущен на Землю 16 августа 1977 года. ФГБ оставался на орбите и совершал управляемый полёт до 2 февраля 1978 года, после чего на 201-е сутки полёта, был сведён с орбиты. В целом полёт первого ТКС был успешным. Лётные испытания показали высокие эксплуатационные и технические характеристики корабля, подтвердили правильность реализованных технических решений.
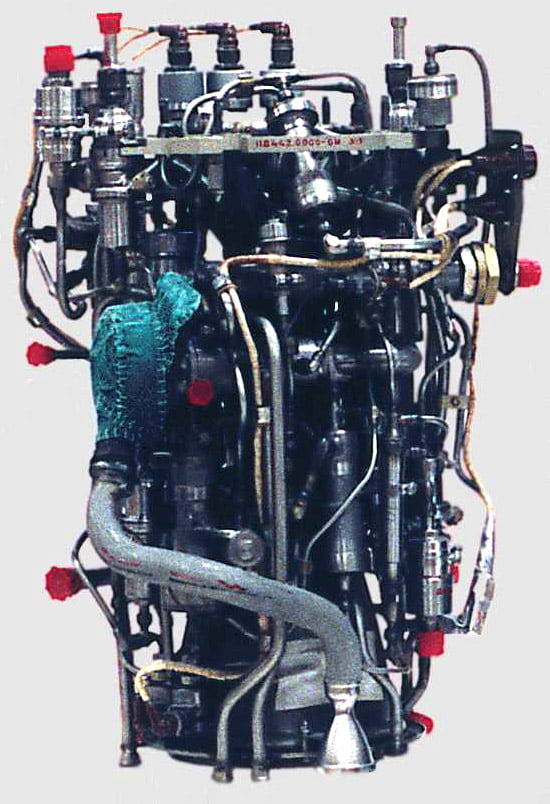 В значительной степени, удача в первом полёте нового корабля была достигнута и благодаря корректирующему ЖРД КРД-442 (11Д442), разработанному в «КБ ХИММАШ» в 1972-1977 гг.
В значительной степени, удача в первом полёте нового корабля была достигнута и благодаря корректирующему ЖРД КРД-442 (11Д442), разработанному в «КБ ХИММАШ» в 1972-1977 гг.
Однокамерный ЖРД 11Д442 многократного включения с турбонасосной системой подачи топлива является маршевым двигателем многих космических аппаратов, но разрабатывался он именно для РКК «Алмаз». Двигатель создавал импульсы тяги для сближения ТКС со станцией и коррекции орбиты КА.
Двигатель имеет «открытую» схему подачи топлива в камеру и газогенератор и систему подачи перекачиваемых компонентов.
Компоненты топлива подаются в камеру и газогенератор (ГГ) (на режиме тяги), перекачиваются и подаются в ГГ (на режиме перекачки) турбонасосным агрегатом. ТНА использует энергию газа, поступающего из ГГ. В ГГ вырабатывается газ с избытком горючего при сгорании основных компонентов топлива.
Двигатель создаёт силу тяги, направленную вдоль оси объекта (на режиме тяги) и перекачивает компоненты топлива из баков низкого давления в баки высокого давления (на режиме перекачки).
При пуске двигателя ротор ТНА раскручивается продуктами сгорания компонентов топлива, подаваемых в ГГ поршневыми насосами.
Для управления клапанами двигателя и для привода насосов подачи топлива в ГГ при пуске используется газ (гелий) из пневмосистемы двигательной установки.
Двигатель управляется подачей электрических команд. Режим работы двигателя поддерживается золотником, серводросселем и стабилизатором.
Компоненты топлива — четырёхокись азота и НДМГ.
Основные технические характеристики двигателя: тяга в пустоте — 4,38 кН (на режиме тяги) или 0,17 кН (на режиме перекачки); давление в камере сгорания — 3,92 МПа; соотношение компонентов топлива — 1,76 (на режиме тяги) или 1,58 (на режиме перекачки); расход окислителя через двигатель — 0,92 кг/с (на режиме тяги) или 0,87 кг/с (на режиме перекачки); расход горючего через двигатель — 0,49 кг/с (на режиме тяги) или 0,55 кг/с (на режиме перекачки); масса двигателя, залитого компонентами топлива — 52 кг.
Полёты ОПС «Алмаз» («Салют-3» и «Салют-5») продемонстрировали, что пилотируемые полёты в целях ведения разведки из космоса малоэффективны и не оправдывают их высокой стоимости. Экипаж очень мало времени смог проработать с военным оборудованием, так как много времени тратил на поддержание станции в рабочем состоянии и на поддержание своей жизнедеятельности. Технологии, применённые на ОПС «Алмаз», вполне могли использоваться в автоматическом режиме на более дешёвых беспилотных спутниках — вывод, к которому в США пришли в 1969 году.
Подобно ДОС, разработки Королёвского КБ, в «фирме Челомея» также разработали ОПС-4 с двумя стыковочными узлами, один из которых был предназначен для стыковки с ТКС, а другой — для стыковки с транспортным кораблём «Союз». Однако финансирование проекта ОПС-4 было прекращено в январе 1978 года.
Однако работы по созданию ТКС продолжались. И продолжение рассказа об этих работах обязательно будет.
![]() 20 июля 1976 года — посадка на Марс АМС «Викинг» (США).
20 июля 1976 года — посадка на Марс АМС «Викинг» (США).
В 1975 году НАСА запустило к Марсу две автоматические станции проекта «Викинг» (Viking). Первая из них стартовала 20 августа 1975 года, а вторая — 9 сентября. Главной целью полёта этих наиболее совершенных на тот момент автоматических космических аппаратов было выяснить, есть ли жизнь на Марсе.
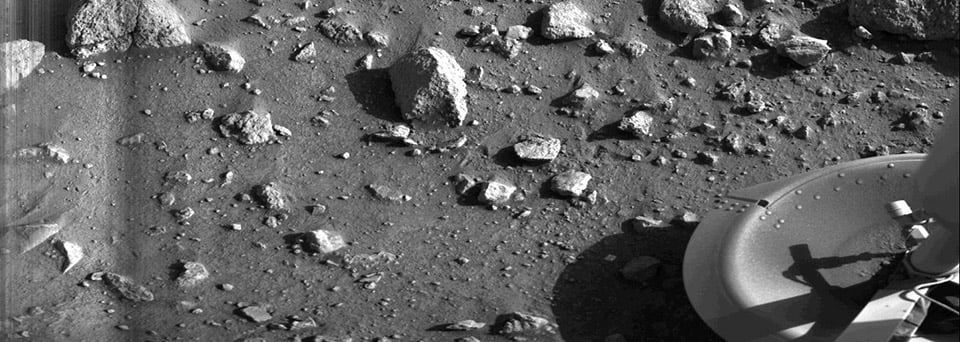
 Ровно через 11 месяцев, 20 июля 1976 года, спускаемый модуль АМС «Викинг-1» совершил мягкую посадку на поверхность красной планеты.
Ровно через 11 месяцев, 20 июля 1976 года, спускаемый модуль АМС «Викинг-1» совершил мягкую посадку на поверхность красной планеты.
Космический аппарат «Викинг» состоял из орбитального и посадочного блоков. Масса орбитального блока (созданного на базе КА «Маринер-8, -9») 2300 кг, в том числе топливо для КТДУ 1405 кг, масса научных приборов 57 кг. Размах панелей солнечных батарей — 10 м. Батареи обеспечивали у Земли мощность 1 кВт, у Марса — 0,5 кВт. В энергосистеме были установлены две аккумуляторные никель-кадмиевые батареи, включаемые в периоды потребления пиковой мощности и в периоды захода орбитального блока в тень Марса.
 В качестве исполнительных органов трёхосной системы ориентации использовались микродвигатели, работающие на сжатом азоте. КТДУ использует ЖРД тягой 1,3 кН, работающий на четырёхокиси азота и монометилгидразине. ЖРД КТДУ является модификацией двигателя КА «Маринер-9» (обзор №2-21 21–31.05.2017).
В качестве исполнительных органов трёхосной системы ориентации использовались микродвигатели, работающие на сжатом азоте. КТДУ использует ЖРД тягой 1,3 кН, работающий на четырёхокиси азота и монометилгидразине. ЖРД КТДУ является модификацией двигателя КА «Маринер-9» (обзор №2-21 21–31.05.2017).
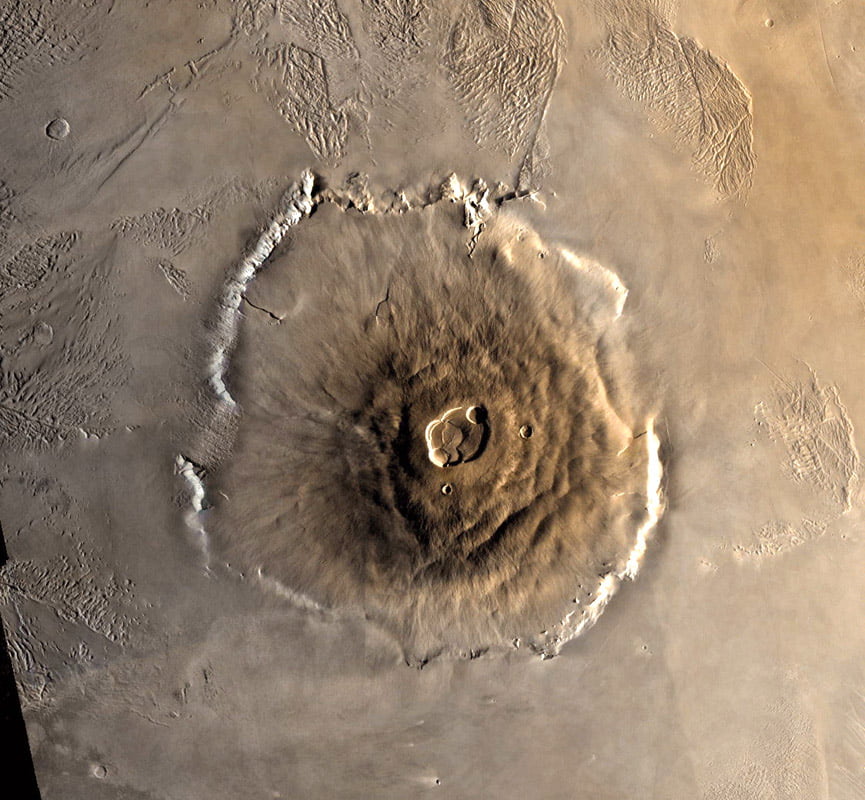
 В состав научной аппаратуры орбитального блока входили две телекамеры, ИК спектрометр для регистрации водяных паров в марсианской атмосфере и ИК радиометр для получения тепловой карты планеты.
В состав научной аппаратуры орбитального блока входили две телекамеры, ИК спектрометр для регистрации водяных паров в марсианской атмосфере и ИК радиометр для получения тепловой карты планеты.
Масса посадочного блока при старте 1120 кг, при посадке на Марс 577 кг. К корпусу крепились две штанги (длиной 3 м) для размещения на них метеорологических приборов и грунтозаборника. Электропитание осуществлялось от двух радиоизотопных источников, общей мощностью 76 Вт.
 Радиосистема имела два передатчика, один из которых обеспечивал непосредственную связь с Землёй, а другой служил для передачи информации на орбитальный блок, который ретранслировал её на Землю.
Радиосистема имела два передатчика, один из которых обеспечивал непосредственную связь с Землёй, а другой служил для передачи информации на орбитальный блок, который ретранслировал её на Землю.
Для схода с ареоцентрической орбиты, торможения и мягкой посадки на поверхность Марса, в составе посадочного блока применялись лобовой экран диаметром 3,6 м и восемь ЖРД МТ тягой по 45 Н, парашют с куполом диаметром 16,2 м, три рулевых двигателя с изменяемой тягой 0,4…2,6 Н, предназначенные для торможения на конечном участке после отделения тормозного парашюта. Кроме того, на корпусе посадочного блока устанавливались шесть ЖРДМТ тягой 45 Н для ориентации на участке работы рулевых двигателей. Правильность выполнения программы схода с орбиты, торможения и посадки обеспечивалась бортовым компьютером. В компьютер также вводилась программа работы научной аппаратуры посадочного блока, которая включала в себя масс-спектрометр газов, акселерометры, две фототелевизионные установки, метеорологические приборы, магниты, тензометры и другие устройства для исследования свойств грунта, сейсмометр, установка для определения наличия жизни по таким признакам как газообмен, обмен веществ и фотосинтез. В последние три прибора грунт закладывался с помощью грунтозаборника.
 АМС «Викинг-1» и «Викинг-2» запускались с помощью РН «Титан-3Е». Первый «Викинг» вышел на начальную ареоцентрическую орбиту 19 июня 1976 года. Параметры орбиты: перицентр — 1500 км, апоцентр — 50600 км, наклонение орбиты — 33,4°, период обращения — 42,6 ч. В дальнейшем аппарат был переведён на синхронную орбиту с перицентром 1500 км над расчётным районом посадки посадочного блока. Съёмка с орбиты предварительно выбранного основного расчётного района посадки показала, что он является весьма пересечённым. От посадки в нём отказались. Было исследовано ещё несколько районов путём съёмки с ареоцентрической орбиты и радиолокационного зондирования с Земли. Их тоже нашли слишком пересечёнными. Пригодным сочли район в области Chryse Planitia (22,27° с.ш. и 48° з.д.), где посадочный блок аппарата «Викинг-1» и совершил успешную мягкую посадку 20 июля 1976 года в 11 час. 53 мин. по Гринвичу.
АМС «Викинг-1» и «Викинг-2» запускались с помощью РН «Титан-3Е». Первый «Викинг» вышел на начальную ареоцентрическую орбиту 19 июня 1976 года. Параметры орбиты: перицентр — 1500 км, апоцентр — 50600 км, наклонение орбиты — 33,4°, период обращения — 42,6 ч. В дальнейшем аппарат был переведён на синхронную орбиту с перицентром 1500 км над расчётным районом посадки посадочного блока. Съёмка с орбиты предварительно выбранного основного расчётного района посадки показала, что он является весьма пересечённым. От посадки в нём отказались. Было исследовано ещё несколько районов путём съёмки с ареоцентрической орбиты и радиолокационного зондирования с Земли. Их тоже нашли слишком пересечёнными. Пригодным сочли район в области Chryse Planitia (22,27° с.ш. и 48° з.д.), где посадочный блок аппарата «Викинг-1» и совершил успешную мягкую посадку 20 июля 1976 года в 11 час. 53 мин. по Гринвичу.
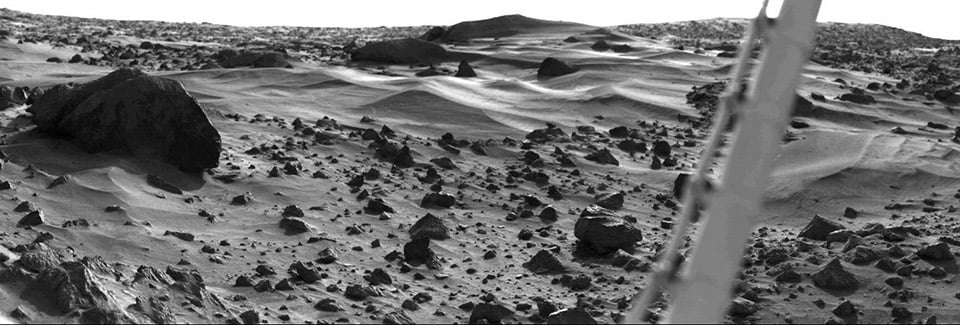
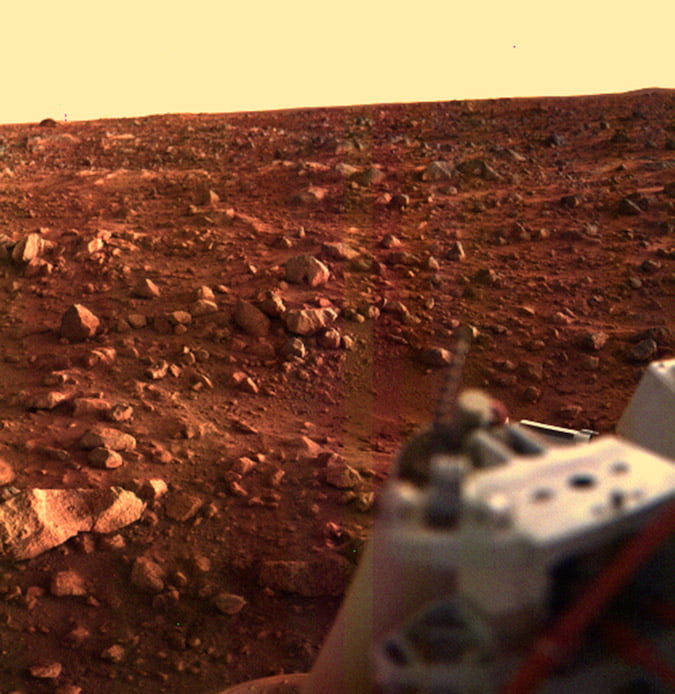
 Немедленно после посадки началась съёмка поверхности планеты, метеорологические измерения, а с 28 июля — исследования грунта для идентификации неорганических и органических веществ, а также для поиска признаков жизни. «Викинг-1» впервые в истории передал на Землю цветные фотографии Марса.
Немедленно после посадки началась съёмка поверхности планеты, метеорологические измерения, а с 28 июля — исследования грунта для идентификации неорганических и органических веществ, а также для поиска признаков жизни. «Викинг-1» впервые в истории передал на Землю цветные фотографии Марса.
Посадочный блок работал в активном режиме до 1 сентября, когда наземные средства в основном перешли на обеспечение посадки и работы на поверхности Марса посадочного блока АМС «Викинг-2». Одновременную работу в активном режиме двух посадочных блоков эти средства обеспечить не могли.
 25 ноября Марс зашёл за Солнце для земного наблюдателя. Примерно в течение двух недель до этой даты и двух недель после неё работа с посадочными и орбитальными блоками АМС «Викинг» в активном режиме не велась, поскольку связи с ними мешало радиоизлучение Солнца. В этот период проводился эксперимент по поиску эффекта, предсказанного общей теорией относительности: изменение скорости радиосигнала под воздействием гравитационного поля Солнца. Этот эффект был обнаружен: запаздывание сигнала, посланного с Земли и ретранслированного бортовой аппаратурой обратно на Землю, достигало 200 мкс.
25 ноября Марс зашёл за Солнце для земного наблюдателя. Примерно в течение двух недель до этой даты и двух недель после неё работа с посадочными и орбитальными блоками АМС «Викинг» в активном режиме не велась, поскольку связи с ними мешало радиоизлучение Солнца. В этот период проводился эксперимент по поиску эффекта, предсказанного общей теорией относительности: изменение скорости радиосигнала под воздействием гравитационного поля Солнца. Этот эффект был обнаружен: запаздывание сигнала, посланного с Земли и ретранслированного бортовой аппаратурой обратно на Землю, достигало 200 мкс.
С середины декабря 1976 года снова началась поочерёдная работа посадочных блоков в активном режиме, а также продолжались исследования с помощью орбитальных блоков обеих АМС, но уже не по основной программе, которая была завершена в ноябре 1976 года, а по продлённой программе.
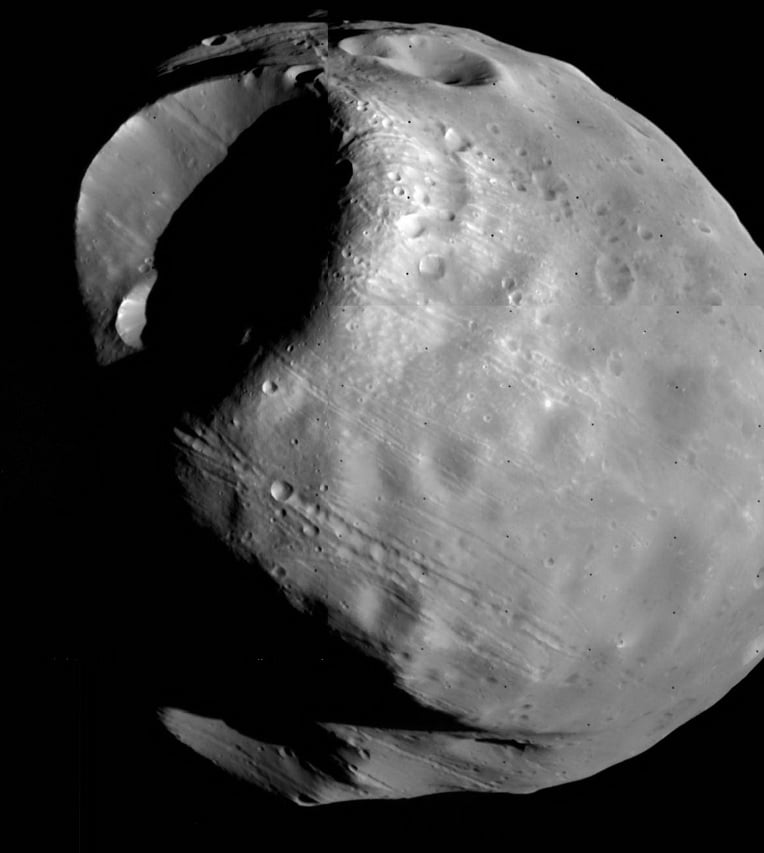
Ареоцентрическая орбита первого орбитального блока в январе 1977 года была скорректирована с таким расчётом, чтобы он прошёл 18 февраля на расстоянии всего 70 км от Фобоса. Сеансы съёмки этого спутника Марса проводились с 18 до 23 февраля 1977 года. По возмущениям орбиты орбитального блока в поле тяготения Фобоса определялась его масса. Удалось также сфотографировать Деймос. Позже орбитальный блок был переведён на орбиту с перицентром примерно 300 км.
 Работа с орбитальным блоком АМС «Викинг-1» была прекращена 7 августа 1980 года вследствие израсходования бортового запаса рабочего тела (сжатый азот) микродвигателей системы ориентации. Работа с орбитальным блоком «Викинга-2» по той же причине была прекращена 25 июля 1978 года. Связь с посадочным блоком «Викинга-1» прекратилась в ноябре 1982 года, а «Викинга-2» в марте 1980 года из-за неполадок в системе энергопитания.
Работа с орбитальным блоком АМС «Викинг-1» была прекращена 7 августа 1980 года вследствие израсходования бортового запаса рабочего тела (сжатый азот) микродвигателей системы ориентации. Работа с орбитальным блоком «Викинга-2» по той же причине была прекращена 25 июля 1978 года. Связь с посадочным блоком «Викинга-1» прекратилась в ноябре 1982 года, а «Викинга-2» в марте 1980 года из-за неполадок в системе энергопитания.
АМС «Викинг-1» и «Викинг-2» проработали четыре года! И за это время телекамеры космических аппаратов не зарегистрировали ничего, напоминающего проявления жизни. Анализ марсианской атмосферы и грунта не выявил никаких особенностей, «типичных» для жизни. В частности, не обнаружено никаких следов метана.
Был получен огромный объём научной информации: 51539 орбитальных снимков, 4500 панорамных снимков с поверхности, многочисленные метеорологические данные. Всё это требовало расшифровки и осмысления. Да и затраты на проект «Викинг» были довольно значительны — почти 1 миллиард долларов (ерунда по сравнению с программой «Аполлон»). Все эти причины послужили хорошим предлогом, чтобы на некоторое время забыть о Марсе и марсианах. Следующая американская автоматическая орбитальная станция нового поколения отправится к Марсу только в 1992 году.
При подготовке материалов были использованы следующие источники:
- И. Б. Афанасьев, Д. А. Воронцов. Золотой век космонавтики: мечты и реальность. — М.: Фонд «Русские витязи», 2015.
- Э. Т. Радченко. Создание транспортного корабля снабжения комплекса «Алмаз» / В кн. «История развития отечественной пилотируемой космонавтики» / Сост. М. А. Первов. — Федеральное космическое агентство, Российская академия космонавтики им. К. Э. Циолковского, 2015.
- Двигатели 1944-2000. Авиационные, ракетные, морские, промышленные. — М.: «АКС-Конверсалт», 2000.
- Ежегодник Большой Советской Энциклопедии, 1977.
- Журнал «Америка», №241, декабрь, 1980.
- http://galspace.spb.ru/index436-1.html.
| « | В этот день… №2-25 (1-10 июля) | В этот день… №2-27 (21-31 июля) | » |

